Transportation

Simulation results from EVI-OnDemand estimating need for infrastructure to support electric ride-hailing vehicles in the US.
- Categories:
 175 Views
175 Views
This paper proposes methods of predicting and preventing thermal failure within high-power ferrite structures of electric vehicle (EV) wireless charging inductive power transfer (IPT) by improving their ferrite layouts. A high-power IPT magnetic design suitable for wirelessly charging an EV at 50 kW using a heuristic approach is presented where the chosen design achieves reduced heating within the magnetic structure. Recommendations are made that both avoid ferrite fracturing due to magnetic hotspots and cause temperature differentials across ferrite tiles, and regarding airgap distribution
- Categories:
457 Views
Dataset haiving the curvature and spline values for the roundabout
- Categories:
68 Views
This dataset is used to design patent. The system is basic , as can be seen from figure.
There is related dataset- Data: 255W Panel Connected 72Ah Li-Ion.
This new datasets are needed to show that I know how to make simulation and the dataset of 'Data: 255W Panel Connected 72Ah Li-Ion' is not fake.
The boost converter, BMS is on existing designs.It is very simple for any graduate,degree holder or school students, so no paper is written for it.
- Categories:
741 Views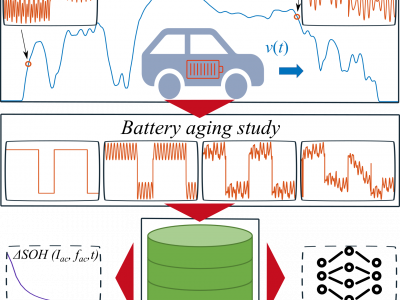
The SiCWell Dataset contains data of battery electric vehicle lithium-ion batteries for modeling and diagnosis purposes. In this experiment, automotive-grade lithium-ion pouch bag cells are cycled with current profiles plausible for electric vehicles.
The analysis of current ripples in electric vehicles and the corresponding aging experiments of the battery cells result in a dataset, which is composed of the following parts:
- Categories:
6335 Views
Please cite the following paper when using this dataset:
N. Thakur, "Twitter Big Data as a Resource for Exoskeleton Research: A Large-Scale Dataset of about 140,000 Tweets from 2017–2022 and 100 Research Questions", Journal of Analytics, Volume 1, Issue 2, 2022, pp. 72-97, DOI: https://doi.org/10.3390/analytics1020007
Abstract
- Categories:
2782 Views
We propose a novel high-resolution dataset named, “Dataset for Indian Road Scenarios (DIRS21)” for developing perception systems for advanced driver assistance systems.
- Categories:
4631 Views
We design a solution to achieve coordinated localization between two unmanned aerial vehicles (UAVs) using radio and camera perception. We achieve the localization between the UAVs in the context of solving the problem of UAV Global Positioning System (GPS) failure or its unavailability. Our approach allows one UAV with a functional GPS unit to coordinate the localization of another UAV with a compromised or missing GPS system. Our solution for localization uses a sensor fusion and coordinated wireless communication approach.
- Categories:
497 Views
his corpus was approved by Air Traffic Management Bureau, Civil Aviation Administration of China (CAAC). All speech had been recorded by real radiotelephony between air traffic controllers (ATCs) and pilots from December 15, 2020 to January 14, 2021. The raw data comprised around 700,000 segments of ATCs speech involving all work stations over 3 daily periods (0200–0700, 1000–1200 and 1330–1530 hours). Finally, seven controllers with different genders, age groups, controller levels and control positions were identified, namely ATCs_1 to ATCs_7.
- Categories:
711 Views
- Categories:
259 Views