Energy

Clean energy technologies, encompassing renewable resources like solar, wind, and hydropower, are essential in the global effort to reduce greenhouse gas emissions and combat climate change. As the globe prepares to transition away from fossil fuels, understanding the factors and parameters influencing the penetration of clean energy into existing energy markets has become a critical step. Controversies surrounding the environmental impacts of renewable technologies, variability in market structures, and economic pressures on clean energy companies can complicate this transition.
- Categories:
 112 Views
112 Views
The recent developments in the field of the Internet of Things (IoT) bring alongside them quite a few advantages. Examples include real-time condition monitoring, remote control and operation and sometimes even remote fault remediation. Still, despite bringing invaluable benefits, IoT-enriched entities inherently suffer from security and privacy issues. This is partially due to the utilization of insecure communication protocols such as the Open Charge Point Protocol (OCPP) 1.6. OCPP 1.6 is an application-layer communication protocol used for managing electric vehicle chargers.
- Categories:
793 Views
We introduce a dataset comprised of energy consumption data from smart meters in French households, capturing detailed, disaggregated time series for various home appliances. This dataset covers a six-month period with a one-minute sampling rate across five different households. The objective of this dataset is to support the development of models that learn disentangled representations of time series energy data, which can significantly enhance model generalization across both in-distribution and out-of-distribution scenarios.
- Categories:
195 Views
- Categories:
111 Views
This dataset includes the actual operational data from twelve wind turbines at Zhangbei wind farm in Hebei province, China. The SCADA data of twelve wind turbines was collected at 60-second intervals from March 2014 to March 2015. The specification of the wind turbines in the wind farm is as follows: the cut-in wind speed is 1m/s, the rated wind speed is 12m/s, the cut-out wind speed is 25m/s, and the rated power is 1500kW. four simulated data manually generated for data cleaning.
- Categories:
397 Views
This is a pump fillage time series data set, consisting of 8 time series. The data is sourced from actual production data during the operational process of an oil field. It includes data from 8 oil wells, with measurements collected every half hour between July 22, 2022, and August 16, 2022. The pump fillage is extracted from the operational process of an oil field. The pump fillage data for each well is sorted in chronological order to obtain the pump fillage time series for each well. The data set had varying numbers of cards due to potential communication issues, rangin
- Categories:
66 Views
This is a pump fillage time series data set, consisting of 8 time series. The data is sourced from actual production data during the operational process of an oil field. It includes data from 8 oil wells, with measurements collected every half hour between July 22, 2022, and August 16, 2022. The pump fillage is extracted from the operational process of an oil field. The pump fillage data for each well is sorted in chronological order to obtain the pump fillage time series for each well. The data set had varying numbers of cards due to potential communication issues, rangin
- Categories:
27 Views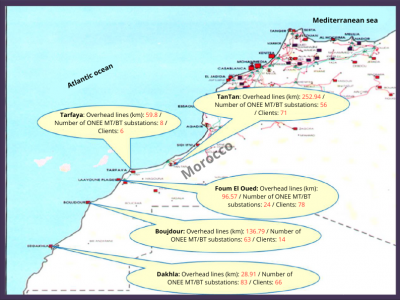
This dataset supports the manuscript titled “Strategies for Mitigating Degradation of Medium Voltage Electrical Equipment in Harsh Saline Environments.” The study focuses on identifying and addressing the challenges faced by medium voltage equipment in coastal environments characterized by high salinity, humidity, and extreme weather conditions. The dataset includes:
- Categories:
113 Views
The given data contains the results from laboratory trials related to the paper "Optimizing Congestion Management andEnhancing Resilience in Low-Voltage Grids Using OPF and MPC Control Algorithms Through Edge Computing and IEC 61850 Standards" currently in publication in IEEE Access.
- Categories:
233 Views
Autonomous underwater vehicles (AUVs) are extensively utilized for underwater resource exploration, requiring inductive power transfer (IPT) systems with large output power to achieve quick charging. However, underwater positioning errors result in significant variations in the coupling coefficient of the IPT system. Moreover, AUVs employ diverse battery types and voltages, exacerbating the issue of decreased transferred power when the coupling coefficient and battery voltage are low, thereby prolonging the AUVs' charging time.
- Categories:
98 Views