Geoscience and Remote Sensing

The dataset contains the ground-based observations of crop growth stages for Canada's prairie provinces (Manitoba, Saskatchewan and Alberta) from 2019 to 2020. Crop growth stages were visually observed from the side of the fields on a weekly cycle until the fields were harvested. The BBCH (Biologische Bundesanstalt, Bundessortenamt und CHemische Industrie) scale was used to stage growth.
- Categories:
 491 Views
491 Views
The dataset provides crop-type surveys for Canada's prairie provinces (Manitoba, Saskatchewan and Alberta) in 2020 and 2021. The data were collected via windshield survey(driving through the countryside with GPS-enabled data collection software and satellite imagery). Crop-type points and their geographic coordinates on the ground were gathered using data collection software. Field boundaries were identified on satellite imagery. A single observation point is dropped in a homogeneous area within the field.
- Categories:
273 Views
The study focused on two regions in Rupnagar district, India, with an area of 216 km² as shown in Fig. 1a, using satellite data from June to November 2023. The upper region predominantly features paddy and maize, while the lower region includes paddy and sugarcane. Satellite images were obtained from PlanetScope’s 130-satellite constellation, with a spatial resolution of 3 meter. A total of 32 images, captured between late May and mid-November 2023, were used, all with less than 15% cloud cover.
- Categories:
150 Views
The dataset has undergone format conversion based on URPC2021_Sonar_images_data, enabling it to be trained by YOLO and RT-DETR models.
The folder 'images' contains image files
The folder 'labels' contains TXT format annotation files.
The annotation file in the folder annotations is in XML format
Data.yaml is the configuration file for YOLO training
Data_deTR is the configuration file for RT-DETR and US-DETR training
- Categories:
91 Views
The LunarRock3D dataset is a novel contribution to the field of lunar geology and automated exploration, offering a rich collection of high-quality 3D lunar rock models. This dataset has been meticulously crafted to overcome the dearth of comprehensive 3D models of lunar rocks, thereby filling a critical gap in existing lunar surface datasets.Comprising a diverse array of rock types encountered in multiple lunar exploration missions, the LunarRock3D dataset provides detailed geometric and textural attributes of lunar rocks.
- Categories:
94 Views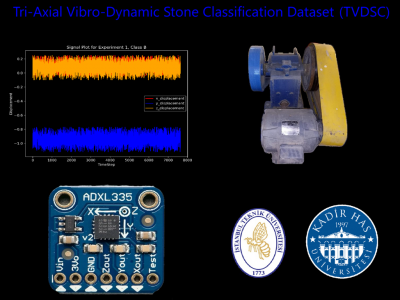
Experiment Details:
- Categories:
1554 Views
The dataset provides detailed information for wheat crop monitoring in the Karnal District, India, spanning the period from 2010 to 2022. It is divided into four main components. The first component, Remote Sensing Data, includes Sentinel-2 (10 m resolution) satellite data averaged over village boundaries, specifically over a wheat crop mask. This folder contains two Excel files: one for NDVI (Normalized Difference Vegetation Index) and another for NDWI (Normalized Difference Water Index), both providing fortnightly data during the Rabi season across a 10-year period.
- Categories:
441 Views
This dataset includes the raw data and analyzed data for an IEEE TvCg article:
- Categories:
30 Views
In underground mining process, the evolution of fissures, fractures, and breakages in overlying rock strata can lead to water inrush and many other serious risks including rock bursts, roof collapses, and ground subsidence. Since directly observing strata behavior is challenging, downscaled similar material simulations are often relied upon as a proven effective method for strata pattern analysis.
- Categories:
103 Views
This is a reservoir water surface area and water levels dataset including 32 major reservoirs in Mekong River basin. For all the 32 reservoirs, water levels were inverted by using improved DEM-derived A-E model (combined with actual reservoir parameters limitation), improved DEM-derived A-E model (combined with actual reservoir parameters limitation) or satellite-derived A-E model based on the Landsat-derived surface area. An initial time series was constructed based on the optimal improved A-E model according to their own altimetry data availability.
- Categories:
68 Views