Continuous-time signal processing

This dataset aims to support research on temporal segmentation of the Timed Up and Go (TUG) test using a first-person wearable camera. The data collection includes a training set of 8 participants and a test set of 60 participants. Among the 8 participants, the test was completed at both a normal walking pace and a simulated slower walking pace to mimic elderly movement patterns. The 60 participants were randomly divided into two groups: one group completed the test at a normal walking pace, and the other group simulated slower walking speed to mimic elderly movement patterns.
- Categories:
 55 Views
55 Views
Endurance running is a popular activity due to its accessibility. However, participation is sometimes prevented by individuals experiencing respiratory problems. Monitoring breathing with body area networks can tackle these issues by tracking respiration during exercise and providing immediate, guiding feedback. Common breathing guidance systems rely on observational data from past breath cycles and consequently inherit disruptively lagging guidance interventions if breathing pattern suddenly change.
- Categories:
20 Views
We introduce a dataset comprised of energy consumption data from smart meters in French households, capturing detailed, disaggregated time series for various home appliances. This dataset covers a six-month period with a one-minute sampling rate across five different households. The objective of this dataset is to support the development of models that learn disentangled representations of time series energy data, which can significantly enhance model generalization across both in-distribution and out-of-distribution scenarios.
- Categories:
195 Views
The data set is a time series of gas concentration collected continuously in a coal mine in China. The data set collects data once every hour. The gas concentration record period in this data set is from 0 : 00 on January 1,2021 to 15 : 00 on March 27,2021. The data set only contains two attributes : time and gas concentration on the working face.
- Categories:
95 Views
This paper introduces a novel chip electromagnetic fingerprint (EMF) feature extraction scheme based on the Frequency-domain Constellation Trajectory Figure (FCTF), as well as an EMF recognition method using Convolutional Neural Networks (CNN) for MCU function recognition. The FCTF offers a two-dimensional visualization of the amplitude-frequency characteristics of chip electromagnetic (EM) leakage, effectively highlighting high-amplitude frequency features while suppressing low-amplitude ones.
- Categories:
51 Views
The TE process dataset consists of a training set and a test set, and the training set and test set data consist of data from 22 different simulation runs, respectively, with each sample data containing 12 manipulated variables, 22 continuous process measurement variables, and 19 component measurement variables. The training set samples are numbered as d00.dat to d21.dat, and the test set samples are numbered as d00_te.dat to d21_te.dat. where d00.dat and d00_te.dat are the samples under normal operating conditions. d00.dat training samples are obtained under 25h running simulation.
- Categories:
164 Views
ZJT datasets: It was collected from the production line of China Tobacco Zhejiang Industrial Company. The data was sampled every two seconds for a week from 162 sensors deployed on a variety of production devices (e.g., paper cut-ting wheel, power supply, etc.). Since ZJT is a dataset from real-world production line, it does not contain serious anoma-lies from accidents or attacks. Thus, we treat the states of transforming between different producing modes as anoma-lies. The ratio of normal states to abnormal states is 4:1.
- Categories:
45 Views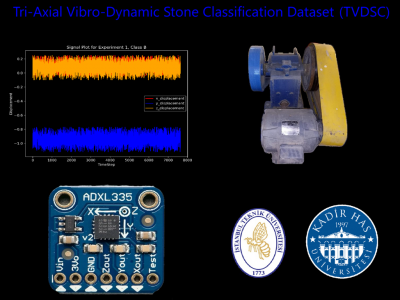
Experiment Details:
- Categories:
1679 Views
Subjects are categorized into three groups based on office blood pressure threshold: Normal (N), Prehypertension (P), and Stage 1 Hypertension (S). Each group contains 100 subjects, and all records have duration of at least 8 minutes. This study uses sliding window with length of 1 second and step size of 1 second to segment records. PPG, ECG and BP yield 167432 segments, respectively. MAP, DBP, and SBP are defined as average, minimum, and maximum of each BP segment, respectively. Max-Min normalization is applied to PPG and ECG segments.
- Categories:
548 Views
The source code includes the modified version of QuaDRiGa source code, the scritps that we developed to generate the layout and the channel and delay coefficients for the dual mobile space-ground links. We integrate a practical phenomenon in signal reception by employing both a LOS probability model and a state transition model which follows the semi-Markov approach.
- Categories:
167 Views