Sensors

Presented are the target lists of a total of 8718 measurement frames produced by three (3) radar sensors, matched together with the IMU+GNSS-RTK solution for position and motion of two (2) automobiles. The sensors are synced in respect to their measurement times, but operate independently. Their modulation is offset by a certain frequency, to ensure mono-static evaluation. This allows for a cooperative evaluation of measurements. The sensor positions are static.
- Categories:
 1080 Views
1080 Views
Various experimental data of automated drilling system
- Categories:
121 Views
The data includes the results obtained in the manuscript "Obtaining Enriched Tactile Information from Large Sensing Area Based on Electrical Impedance Tomography".
- Categories:
9 Views
This supporting document presents additional information related to the journal article entitled "Screen-Printed Microcantilevers Coated with Functionalized Mesocellular Foam Silica for Detection of Solvent Vapors". It contains explanations and pictures of the set-up experiments for studying the microcantilever behaviors under different temperatures and solvent vapors.
- Categories:
58 Views
The abstract will be written once the manuscript is accepted.
- Categories:
332 Views
Access to potable water is a critical requirement for human survival. Beyond drinking, water is also necessary for animal consumption, irrigation, as well as domestic and commercial uses. Laboratory assessments of water samples to determine their fitness for use is a vital step in water quality assurance processes. However, laboratory assessments require adherence to stringent measures, which might be difficult to comply with.
- Categories:
3343 Views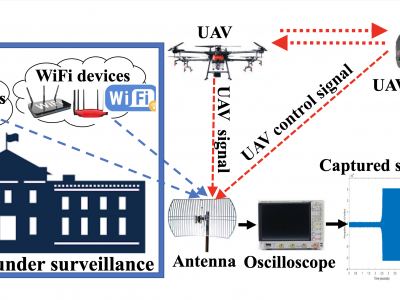
This article presents the details of the Cardinal RF (CardRF) dataset. CardRF is acquired to foster research in RF- based UAV detection and identification or RF fingerprinting. RF signals were collected from UAV controllers, UAV, Bluetooth, and Wi-Fi devices. Signals are collected at both visual line-of-sight and beyond-line-of-sight. The assumptions and procedure for the data acquisition are presented. A detailed explanation of how the data can be utilized is discussed. CardRF is over 65 GB in storage memory.
- Categories:
7727 Views
Solar Insecticidal Lamp, as a professional device for smart phytoprotection, can kill the insects to calculate the insect density, further guiding the famers to spray pesticide accurately. Various experiments were performed by a testbed, combined Solar Insecticidal Lamp with two cameras, to get the dataset including time, Pulse Number of Insecticidal Sounds, Pulse Number of Insecticidal Discharges, insecticidal status, abnormal value, and insecticidal quantity. The dataset can be used for a variety of methods related to the research of insecticidal counting.
- Categories:
343 Views
Please cite the following paper when using this dataset:
N. Thakur and C.Y. Han, “An Exploratory Study of Tweets about the SARS-CoV-2 Omicron Variant: Insights from Sentiment Analysis, Language Interpretation, Source Tracking, Type Classification, and Embedded URL Detection,” Journal of COVID, 2022, Volume 5, Issue 3, pp. 1026-1049
Abstract
- Categories:
1377 Views
The respiratory includes selected files related to a study of physiological changes recorded by wearable devices during physical exercise on a home exercise bike. It is focused on testing the effect of face masks and respirators on blood oxygen concentration, breathing frequency, and the heart rate changes.
- Categories:
337 Views