Sensors

This dataset contains data collected from multiple paths, such as Unequally space path, Curved path, ESPLB, data collected from actual paths, and concentration prediction data. This experiment adopts a new concentration data collection path ESBLP method efficiently divides the study area into three parts and measures concentration data along the boundaries to calculate gradients.
- Categories:
 46 Views
46 Views
This dataset is made for traditional, machine learning, and deep neural-network-based virtual sensor development and evaluation.
- Categories:
92 Views
This dataset corresponds to the paper Calibration of a Hail-Impact Energy Electroacoustic Sensor, submitted to IEEE Transactions in Instrumentation and Measurement by Florencia Blasina, Andrés Echarri, and Nicolás Pérez.
The dataset corresponds to the voltage signals acquired regarding several steel-ball impacts on the proposed hail-sensor plate to calibrate it.
- Categories:
88 Views
Experimental measurement data was obtained utilizing RCbenchmark 1780 with full-range PWM signals. Measurements were made for two series of setups.
First series is related to low-voltage setups using the following T-MOTOR components: - motors: MN4014 400Kv, MN5212 340Kv, MN501-S 360Kv, U7 280Kv, MN6007 320Kv, P60 340Kv, MN701-S 280Kv; - ESC: Air 40A, Flame 40A, Flame 70A, Alpha 60A, Flame 100A; - propellers: P17×5.8, P18×6.1, P20×6, P22×6.6, P24×7.2, G26×8.5; - battery: 6-cell (6S) Lithium polymer (LiPo).
- Categories:
165 Views
This report presents an end-to-end methodology for collecting datasets to recognize handwritten English alphabets in the Indian context by utilizing Inertial Measurement Units (IMUs) and leveraging the diversity present in the Indian writing style. The IMUs are utilized to capture the dynamic movement patterns associated with handwriting, enabling more accurate recognition of alphabets. The Indian context introduces various challenges due to the heterogeneity in writing styles across different regions and languages.
- Categories:
810 Views
This is an indoor environment data set collected from our research team's laboratory, and the data is collected from the Intel RealSense D435i camera. There are a total of 12 datasets, each in the format of a `.bag` file in ROS packet format. Each file contains RGB images and IMU data.
- Categories:
186 Views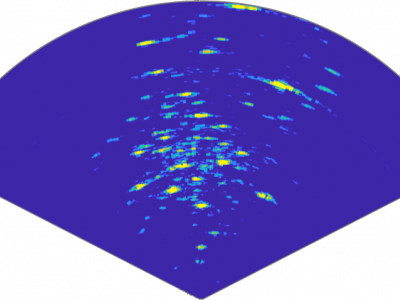
This dataset consists of Images produced from a Seapix-R multibeam echosounder (MBES) pointed at a fish farming cage. The MBES was attached outside the cage on a mounting bracket with a 45 deg downwards tilt, such that most of the cage was within the vertical beamforming capability of the system, with the exception of a small cake-shaped section near the net, 1.5 meters high, extending 5.5 meters into the cage
- Categories:
124 Views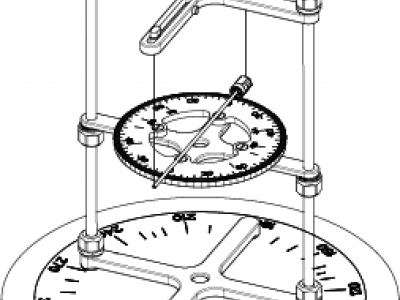
Use of medical devices in the magnetic resonance environment is regulated by standards that include the ASTM-F2213 magnetically induced torque. This standard prescribes five tests. However, none can be directly applied to measure very low torques of slender lightweight devices such as needles. Methods: We present a variant of an ASTM torsional spring method that makes a “spring” of 2 strings that suspend the needle by its ends. The magnetically induced torque on the needle causes it to rotate. The strings tilt and lift the needle.
- Categories:
284 Views
The project research team successfully established China's first Inertial Motion Tracking Dataset (IMTD), which can be widely used for artificial intelligence model training in fields such as satellite-free navigation, unmanned driving, and wearable devices. Based on the IMTD dataset, the motion tracking method proposed by Wang Yifeng, Zhao Yi, and others breaks through the limitations of traditional motion tracking and positioning technologies such as inertia, optics, GPS, and carrier phase.
- Categories:
350 Views
IMUs have gained popularity for tracking joint kinematics due to their portability and versatility. However, challenges such as limited accuracy, lack of real-time data analysis, and complex sensor-to-segment calibration procedures have hindered their widespread use. To address these limitations, we developed a portable system that integrates four IMUs to collect treadmill walking data, with ground truth values obtained from a Motion Capture System.
- Categories:
131 Views