Computer Vision

This Dataset is a self-harm dataset developed by ZIOVISION Co. Ltd. It consists of 1,120 videos. Actors were hired to simulate self-harm behaviors, and the scenes were recorded using four cameras to ensure full coverage without blind spots. Self-harm behaviors in the dataset are limited to "cutting" actions targeting specific body parts. The designated self-harm areas include the wrists, forearms, and thighs.
The full dataset can be accesssed through https://github.com/zv-ai/ZV_Self-harm-Dataset.git
- Categories:
 46 Views
46 Views
The proper evaluation of food freshness is critical to ensure safety, quality along with customer satisfaction in the food industry. While numerous datasets exists for individual food items,a unified and comprehensive dataset which encompass diversified food categories remained as a significant gap in research. This research presented UC-FCD, a novel dataset designed to address this gap.
- Categories:
200 Views
Brain tumors are among the most severe and life-threatening conditions affecting both children and adults. They constitute approximately 85-90% of all primary Central Nervous System (CNS) tumors, with an estimated 11,700 new cases diagnosed annually. The 5-year survival rate for individuals with malignant brain or CNS tumors is alarmingly low, at 34% for men and 36% for women. Brain tumors are categorized into various types, including benign, malignant, and pituitary tumors.
- Categories:
264 Views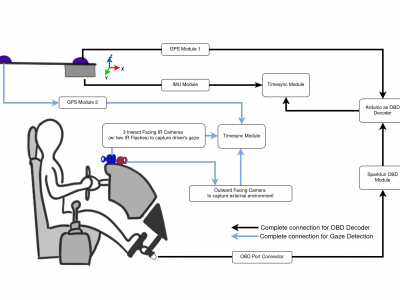
Repeated Route Naturalistic Driving Dataset (R2ND2) is a dual-perspective dataset for driver behavior analysis constituent of vehicular data collected using task-specific CAN decoding sensors using OBD port and external sensors, and (b) gaze-measurements collected using industry-standard multi-camera gaze calibration and collection system. Our experiment is designed to consider the variability associated with driving experience that depends on the time of day and provides valuable insights into the correlation of these additional metrics on driver behavior.
- Categories:
264 Views
This dataset is image data generated by matlab simulation based on star catalog, imaging process analysis, and space target characterization. There are three signal-to-noise ratios in the dataset, the signal-to-noise ratios are 0.7, 1, and 1.5.There are 10 groups of data under each signal-to-noise ratio, and each group of data contains 10 images. It can be used for research such as target detection and tracking.
- Categories:
184 Views
RSHIP137 is a self-built remote sensing dataset of ships, consisting of 119,330 images across 137 categories. The size of each image varies, with the largest having dimensions of 182x699 and the smallest being 7x11. The distribution of categories is highly imbalanced, with the most frequent category being "Barge," which contains 31,466 images, and the least frequent category being "901-fast combat support ship," with only 15 images.
- Categories:
30 Views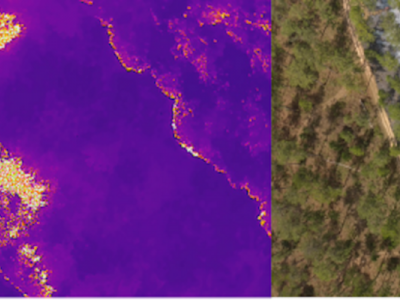
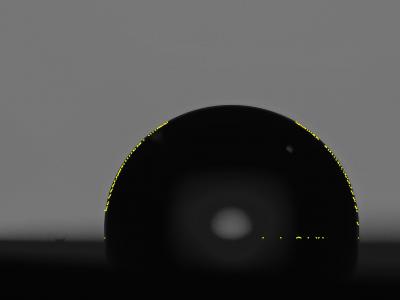
This paper describes a dataset of droplet images captured using the sessile drop technique, intended for applications in wettability analysis, surface characterization, and machine learning model training. The dataset comprises both original and synthetically augmented images to enhance its diversity and robustness for training machine learning models. The original, non-augmented portion of the dataset consists of 420 images of sessile droplets. To increase the dataset size and variability, an augmentation process was applied, generating 1008 additional images.
- Categories:
113 Views
The OnePose dataset contains over 450 video sequences of 150 objects. For each object, multiple video recordings, accompanied camera poses and 3D bounding box annotations are provided. These sequences are collected under different background environments, and each has an average recording-length of 30 seconds covering all views of the object. The dataset is randomly divided into training and validation sets. For each object in the validation set, we assign one mapping sequence for building the SfM map and use a test sequence for the evaluation.
- Categories:
30 Views
Humanoid robots are anticipated to play integral roles in domestic settings, aiding individuals with everyday tasks. Given the prevalence of translucent storage containers in households, characterized by their practicality and transparency, it becomes imperative to equip humanoid robots with the capability to localize and manipulate these objects accurately. Consequently, 6D pose estimation of objects is a crucial area of research to advance robotic manipulation.
- Categories:
148 Views