Transportation

This data set includes the logs of a multi-vehicle autonomous race between 6 vehicles, all controlled by the same controller.
- Categories:
 64 Views
64 Views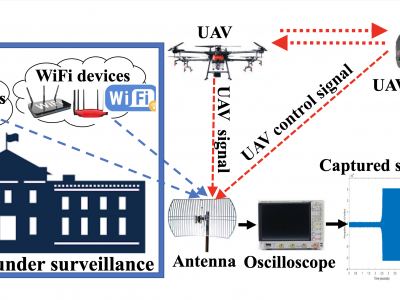
This article presents the details of the Cardinal RF (CardRF) dataset. CardRF is acquired to foster research in RF- based UAV detection and identification or RF fingerprinting. RF signals were collected from UAV controllers, UAV, Bluetooth, and Wi-Fi devices. Signals are collected at both visual line-of-sight and beyond-line-of-sight. The assumptions and procedure for the data acquisition are presented. A detailed explanation of how the data can be utilized is discussed. CardRF is over 65 GB in storage memory.
- Categories:
9713 Views
This dataset contains realistic trajectories from multiple vehicles moving in the simulated environment of CARLA autonomous driving simulator. Two different maps (Map04 and Map10) have been exploited, corresponding to realistic driving conditions in simulated urban environments. Five sub-datasets have been extracted, corresponding to different number of vehicles, e.g., 50, 100 and 200, spawned in each map for 200 seconds.
- Categories:
729 Views
This is the dataset for 'A General Lightweight Odometry Framework for Intelligent Vehicles' See https://github.com/YushengWHU/GIO_dataset for detailed introduction.
- Categories:
45 Views
This dataset contains the vehicular densities from a location in Jeju-si, South Korea. The dataset considers the regions to be classified as a tracking area code (TAC) cell, over which the time-series data for multi-class vehicular densities is provided.The dataset contains the major areas/junctions from where the Jeju International Airport and Jeju Seaport traffic passes on daily. Jeju International Airport is one of the busiest airpots in the world.
- Categories:
222 Views
This dataset consists of the training and the evaluation datasets for the LiDAR-based maritime environment perception presented in our journal publication "Maritime Environment Perception based on Deep Learning." Within the datasets, LiDAR raw data are processed using Deep Neural Networks (DNN). In the training dataset, we introduce the method for generating training data in Gazebo simulation. In the evaluation datasets, we provide the real-world tests conducted by two research vessels, respectively.
- Categories:
1773 Views
BRT Dataset for IEEE VTS
- Categories:
90 Views
This dataset is in support of my research paper '9-DoF Personal Robot Servant'.
Preprint :
On this robot servant, my first work was done in the year 2011.
Image Source: https://www.dreamstime.com/robot-tray-d-rendering-mini-holding-serving-i...
- Categories:
1610 Views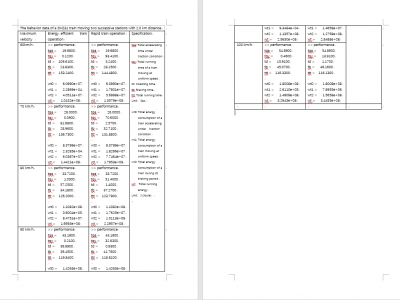
The behavior data of the DKZ31 train moving between two successive stations with 2.0 km is simulated under different control modes.
- Categories:
96 Views
To study the driver's behavior in real traffic situations, we conducted experiments using an instrumented vehicle, which comprises:
(i) a camera, installed above the vehicle's side window and oriented toward the driver, and (ii) a Mobile Digital Video Recorder (MDVR).
- Categories:
3728 Views