Transportation
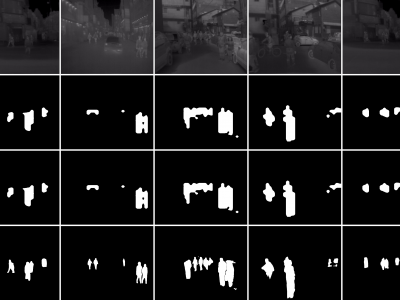
These are tight pedestrian masks for the thermal images present in the KAIST Multispectral pedestrian dataset, available at https://soonminhwang.github.io/rgbt-ped-detection/
Both the thermal images themselves as well as the original annotations are a part of the parent dataset. Using the annotation files provided by the authors, we develop the binary segmentation masks for the pedestrians, using the Segment Anything Model from Meta.
- Categories:
 622 Views
622 Views
Dataset capturedbyrealtimevehicle-mountedcamerasystem, 600 high-quality images was extracted, 480 as training set, 120 as valid set. The images have a resolution of 1600x1200 and encompass three types of pavement defects, that is, cracks, patches and potholes. Our dataset is in YOLO format, YOLO (You Only Look Once) is a popular object detection framework that uses a single neural network to predict bounding boxes and class probabilities for various objects in an image. The YOLO dataset format typically consists of two main components: the image files and the annotation files.
- Categories:
399 Views
Classifying the driving styles is of particular interest for enhancing road safety in smart cities. The vehicle can assist the driver by providing advice to increase awareness of potential dangers. Accordingly, dissuasive measures, such as adjusting insurance costs, can be implemented. The service is called Pay-As-You-Drive insurance (PAYD), and to address it, the paper introduces a method for constructing a database of simulated driver behaviors using the Simulation of Urban MObility Simulation of Urban MObility (SUMO) simulator.
- Categories:
367 Views
The JKU-ITS AVDM contains data from 17 participants performing different tasks with various levels of distraction.
The data collection was carried out in accordance with the relevant guidelines and regulations and informed consent was obtained from all participants.
The dataset was collected using the JKU-ITS research vehicle with automated capabilities under different illumination and weather conditions along a secure test route within the
- Categories:
929 Views
The Partial Discharge - Localisation Dataset, abbreviated: PD-Loc Dataset is an extensive collection of acoustic data specifically curated for the advancement of Partial Discharge (PD) localisation techniques within electrical machinery. Developed using a precision-engineered 32-sensor acoustic array, this dataset encompasses a wide array of signals, including chirps, white Gaussian noise, and PD signals.
- Categories:
1053 Views
The datasets comprise configurations of loading and unloading plans for container ships, generated under six distinct scenarios based on varying numbers of stacks and maximum stack heights of containers in each row. Considering typical container ship characteristics, scenarios encompass stack numbers ranging from 5 to 30 and maximum stack heights from 4 to 10. The dataset includes loading and unloading plans for dockyard containers, with sample plans provided for small ships. Each of the 5 datasets comprises 20 instances representing different container loading and unloading scenarios.
- Categories:
229 Views
This study introduces a significant advancement in vehicle classification, addressing the challenge of limited annotated datasets compliant with Federal Highway Administration (FHWA) guidelines. We present a novel benchmark dataset meticulously curated from various sources to capture variations in time, resolution, camera position, and weather conditions. With a total of 17,174 annotated instances across 7,980 frames, this dataset offers a remarkable granularity for vehicle classification, making this study the first of its kind, to the best of the author’s knowledge.
- Categories:
773 Views
SoC is an indicator of the charge remaining in a battery or it may be explained as an indicator of the difference in charge between a fully charged battery and when that battery is in operation. It is specified as a ratio of the remaining charge in a battery to the maximum charge that can be obtained from the battery. The upper and lower limits of the voltages of a battery are found to be depending on the chemistry of the battery. Sometimes it is higher or lower but in general, it is the span of about 1V from full charge to almost an empty condition of the battery.
- Categories:
284 Views
the dataset includes geospatial vector point and linestring data, and the data size ranges from 4 million records to 100 million records to evaluate the applicability of HiVQ.
- Categories:
8 Views
The transition towards environmentally friendly transportation solutions has prompted a focused exploration of energy saving technologies within railway transit systems. Energy Storage Systems (ESS) in railway transit for Regenerative Braking Energy (RBE) recovery has gained prominence in the pursuit of sustainable transportation solutions. In order to achieve the dual-objective optimization of energy saving and investment, this paper proposes collaborative operation of Onboard Energy Storage Systems (OESS) and Stationary Energy Storage Systems (SESS).
- Categories:
20 Views