Mechanical Sensing

This dataset was collected from force, current, angle (magnetic rotary encoder), and inertial sensors of the NAO humanoid robot while walking on Vinyl, Gravel, Wood, Concrete, Artificial grass, and Asphalt without a slope and while walking on Vinyl, Gravel, and Wood with a slope of 2 degrees. In total, counting all different axes and components of each sensor, we monitored 27 parameters on-board of the robot.
- Categories:
 256 Views
256 Views
When producing bolts in a cold forging process, the pressure signals are recorded per cycle of forming a bolt. The dataset is collected from experiments of different failure modes of a forming machine. Two experiments were recorded in csv format for providing four failure modes, including core broken, cavity block, insufficient lubrication, and material out-of-specification, as well as one normal mode. The two experiments were performed in the same machine with different cavities and cores, and saved in Experimental Data for Modeling and Testing.
- Categories:
572 Views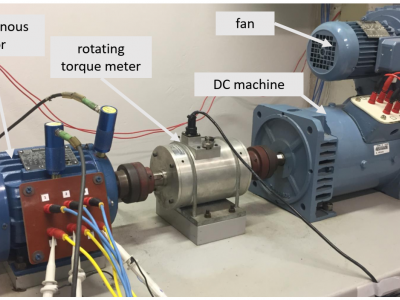
The data set contains electrical and mechanical signals from experiments on three-phase induction motors. The experimental tests were carried out for different mechanical loads on the induction motor axis and different severities of broken bar defects in the motor rotor, including data regarding the rotor without defects. Ten repetitions were performed for each experimental condition.
- Categories:
27255 Views
For Lissajous scanning the synchronization of both axis is crucial. The laser beam is deflected vertically by the first MEMS mirror, redirected to the second mirror and deflected horizontally. In the proposed master slave concept, the synchronization controller Φ compensates for relative phase errors by duty cycle adjustments while individual PLLs keep each MEMS mirror stabilized. This videos show how the projected grid and center pixel drifts if the synchroniaztion controller between both MEMS mirrors with individual PLLs is turned off.
- Categories:
171 Views
Underactuated Cable-Driven Parallel Robots (CDPR) employ a number of cables smaller than the degrees of freedom (DoFs) of the end-effector (EE) that they control. As a consequence, the EE is underconstrained and preserves some freedoms even when all actuators are locked, which may lead to undesirable oscillations. This paper proposes a methodology for the computation of the EE natural oscillation frequencies, whose knowledge has proven to be convenient for control purposes.
- Categories:
203 Views
Program folder contains all the programs used in the paper. The program is based on tensorflow 2.2.The data folder contains manually generated data and bearing data.
- Categories:
125 Views
Raw data of positioning experiment and tracking experiment for "A Laser-Guided Solution to Manipulate Mobile Robot Arm Terminals within a Large Workspace"
- Categories:
169 Views
This dataset presents the measurements corresponding to the article "Validation of a Velostat-Based Pressure Sensitive Mat for Center of Pressure Measurements". You will find the data corresponding to an affordable commercial mat, a Velostat-based mat prototype, and a commercial force platform. The results obtained in the above-mentioned article can be reproduced with them.
- Categories:
695 Views
This data gives the testing data of the 6-DoF maglev rotary table including step response, slope tracking, multi-axis motion. With the numerical wrench model and harmonic force model employed in the control system, the dynamic responses have some differences. Each opj file contains the test group (numerical wrench model) and control group (analytical harmonic model).
- Categories:
226 Views
Stable and efficient walking strategies for humanoid robots usually relies on assumptions regarding terrain characteristics. If the robot is able to classify the ground type at the footstep moment, it is possible to take preventive actions to avoid falls and to reduce energy consumption.
This dataset contains raw data from 10 inertial and torque sensors of a humanoid robot, sampled after the impact between foot and ground. There are two types of data: simulated using gazebo and data from a real robot.
- Categories:
596 Views