Terrain Identification for Humanoid Robots
- Citation Author(s):
-
Reinaldo Bianchi
 (Centro Universitário FEI)
Rogério Gonçalves (Universidade Federal de Uberlândia)Murilo Venâncio (Universidade Federal de Uberlândia)
(Centro Universitário FEI)
Rogério Gonçalves (Universidade Federal de Uberlândia)Murilo Venâncio (Universidade Federal de Uberlândia) - Submitted by:
- Reinaldo Bianchi
- Last updated:
- DOI:
- 10.21227/dw0y-y759
- Data Format:
- Research Article Link:
 603 views
603 views
- Categories:
- Keywords:
Abstract
Stable and efficient walking strategies for humanoid robots usually relies on assumptions regarding terrain characteristics. If the robot is able to classify the ground type at the footstep moment, it is possible to take preventive actions to avoid falls and to reduce energy consumption.
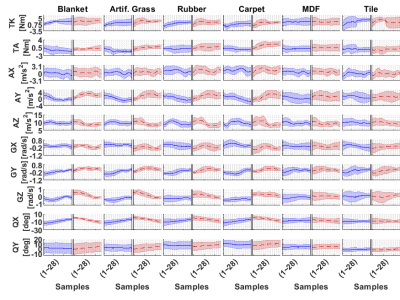
This dataset contains raw data from 10 inertial and torque sensors of a humanoid robot, sampled after the impact between foot and ground. There are two types of data: simulated using gazebo and data from a real robot.
Instructions:
Dataset contains cvs files for several sensors.
I'm planning to use this for simulation purposes
Krishna KM
Mon, 02/08/2021 - 14:18
Permalink
Thank you, I'm planning to use this for learning the locomotion mode classification.
Zexia He
Thu, 02/17/2022 - 09:49
Permalink
Dataset Files
LOGIN TO ACCESS DATASET FILES
Open Access dataset files are accessible to all logged in users. Don't have a login? Create a
free IEEE account. IEEE Membership is not required.