Mechanical Sensing
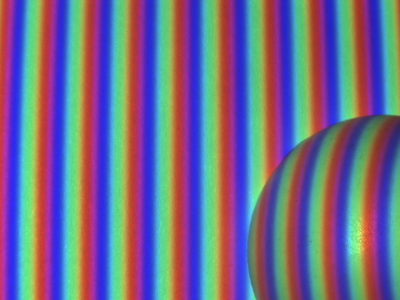
This is a data set to show the advantage of the method in this paper, the data set has two kinds of data: the multi-sine phase-shifting images and comparison method images, the images are all modulated for different targets, such as: The half of white ping pong ball . In this data set, the “3phase.bmp” are the images for the method in this paper, the ”2plus1.bmp” are the images for all kinds of two phase-shifting methods, where R layer image is average intensity image, G layer and B layer images are phase-shifting images.
- Categories:
 49 Views
49 Views
While resistance training promotes muscle hypertrophy, accessibility of equipment is a barrier. This study evaluated a wearable VAriable Resistance Suit (VARS) as a novel and alternative method to achieve muscle hypertrophy. It was hypothesized that by providing adjustable, bi-directional and speed dependent resistance, VARS can target specific muscles to improve muscle strength, size and mass in an accessible and portable device.
- Categories:
19 Views
The data includes the spatial performance of a compliant large-area tactile sensor for hands-on detection.
- Categories:
48 Views
72 Normal 0 21 false false false DE X-NONE X-NONE /* Style Definitions */ table.MsoNormalTable {mso-style-name:"Normale Tabelle"; mso-tstyle-rowband-size:0; mso-tstyle-colband-size:0; mso-style-noshow:yes; mso-style-priority:99; mso-style-parent:""; mso-padding-alt:0cm 5.4pt 0cm 5.4pt; mso-para-margin:0cm; mso-pagination:widow-orphan; font-size:10.0pt; font-family:"Times New Roman",serif;}
- Categories:
11 Views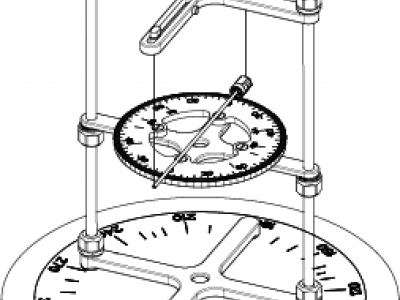
Use of medical devices in the magnetic resonance environment is regulated by standards that include the ASTM-F2213 magnetically induced torque. This standard prescribes five tests. However, none can be directly applied to measure very low torques of slender lightweight devices such as needles. Methods: We present a variant of an ASTM torsional spring method that makes a “spring” of 2 strings that suspend the needle by its ends. The magnetically induced torque on the needle causes it to rotate. The strings tilt and lift the needle.
- Categories:
283 Views
We use industrial cameras to take images of steel wire ropes under different conditions. We put the images of steel wire ropes in five folders, named as:Camera position step up_1; Camera position step up_2; From dark to light; Rotate(360 degrees); Rotate(360 degrees). Images in different folders come from different sources, explained below: Camera position step up_1:Move the camera from bottom to top to obtain images of different positions of the wire rope.
- Categories:
123 Views
This paper presents an active disturbance rejection torque control strategy integrated with a Kalman filter for a pneumatic rotary actuator without pressure feedback. The interference from the position system and nonlinearity from friction and air compressibility can lead to chatter and crawl, presenting challenges to achieving precise torque control of pneumatic rotary actuators. A Kalman filter is designed for real-time filtering to address the chattering of active disturbance rejection controller (ADRC) caused by noise of feedback signal.
- Categories:
43 Views
This is the data of an innovative microstepping motor controller with excitation angular current double-loop feedback control (ACDL), and compared with the data of a conventional stepper motor controller (OP) and angle closed-loop control (AL).
- Categories:
61 Views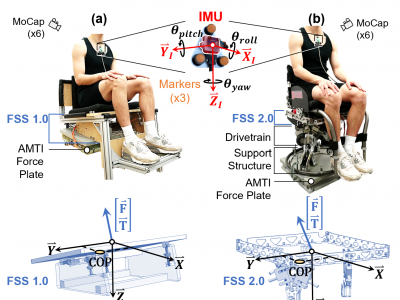
This data was collected during a validation study of our Torso-Dynamics Estimation System (TES). The TES consisted of a Force Sensing Seat (FSS) and an inertial measurement unit (IMU) that measured the kinetics and kinematics of the subject's torso motions. The FSS estimated the 3D forces, 3D moments, and 2D COPs while the IMU estimated the 3D torso angles. To validate the TES, the FSS and IMU estimates were compared to gold standard research equipment (AMTI force plate and Qualisys motion capture system, respectively).
- Categories:
121 Views
We use industrial cameras to take images of steel wire ropes under different conditions, and use these wire rope images to train the U_Net network, and realize the semantic segmentation of the wire rope images by the U_Net network.
- Categories:
748 Views