Machine Learning

*** The paper published on Multimedia Tools and Applications (Springer) - 2024 ***
*** Title: "SPRITZ-PS: Vlaidation of Synthetic Face Images Using A Large Dataset of Printed Docuemnts"***
*** Authors: Ehsan Nowroozi, Yoosef Habibi, and Mauro Conti ***
----------------------------------------------------------------------------------------------------------
- Categories:
 769 Views
769 Views
Drone based wildfire detection and modeling methods enable high-precision, real-time fire monitoring that is not provided by traditional remote fire monitoring systems, such as satellite imaging. Precise, real-time information enables rapid, effective wildfire intervention and management strategies. Drone systems’ ease of deployment, omnidirectional maneuverability, and robust sensing capabilities make them effective tools for early wildfire detection and evaluation, particularly so in environments that are inconvenient for humans and/or terrestrial vehicles.
- Categories:
22097 Views
The software engineering community is working to develop reliable metrics to improve software quality. It is estimated that understanding the source code accounts for 60% of the software maintenance effort. Cognitive informatics is important in quantifying the degree of difficulty or the efforts made by developers to understand the source code.
- Categories:
366 Views
Industrial drying processes are an energy extensive and often one of the most time consuming processes in a manufacturing line. Optimizing the drying process can therefore lead to a reducing in energy consumption and an increase in manufacturing throughput.
- Categories:
501 Views
In the last few years, several organizations have manifested their concern over the increase in use of Hateful Speech or Hate Speech for short, this concept refers to forms of expression or audio-visual content that encourage discrimination or violence against individuals or groups solely based on their gender, sexual orientation, ethnicity, religion or nationality.
- Categories:
151 Views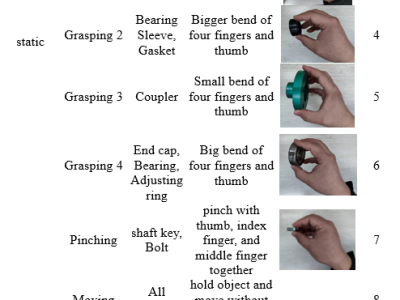
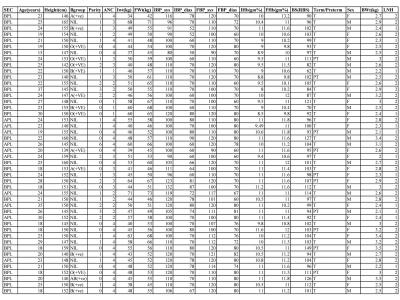
The human hand is composed of distal phalanges, middle phalanges, proximal phalanges, and metacarpals except for the thumb which lacks the middle phalanges. A depth image sensor (Leap Motion) is used to extract the 3D gesture model parameters which includes finger joint coordinates of fingertip coordinates, distal finger joints, proximal finger joints, and finger root joint on the five fingers, the length of fingers, palm point coordinates, palm normal vector, and palm orientation (the direction from the palm to the fingers).static operation gestures include reaching, holding, grasping 1, g
- Categories:
179 Views
This dataset is used for the identification of video in the internet traffic. The dataset was prepared by using Wireshark. It comprises of two types of traffic data, VPN (Virtual Private Network) or encrypted traffic data and Non-VPN or unencrypted traffic. The dataset consist of the data streams (.pcap) of 43 videos. Each video is played 50 times in both VPN and Non-VPN mode. The streams were obtained by setting-up a dummy client on a PC which plays a YouTube video and Wireshark is used to capture the internet traffic.
- Categories:
1230 Views
his repository includes all files regarding to "Analyzing Arabic Twitter-based Patient Experience Sentiments using MARBERT" graduation project.
- Categories:
13 Views
Ground Penetrating Radar (GPR) has a wide range of applications such as detection of buried mines, pipes and wires. GPR has been used as a near-surface remote sensing technique, and its working principle is based on electromagnetic (EM) wave theory. Here proposed data set is meant for data driven surrogate modelling based Buried Object Characterization. The considered problem of estimating geophysical parameters of a buried object is 2D. The training and testing scenarios include B-scan images (2D data), which contain 16 pairs of A-scan (concatenated forms of A-scans).
- Categories:
880 Views