Datasets
Standard Dataset
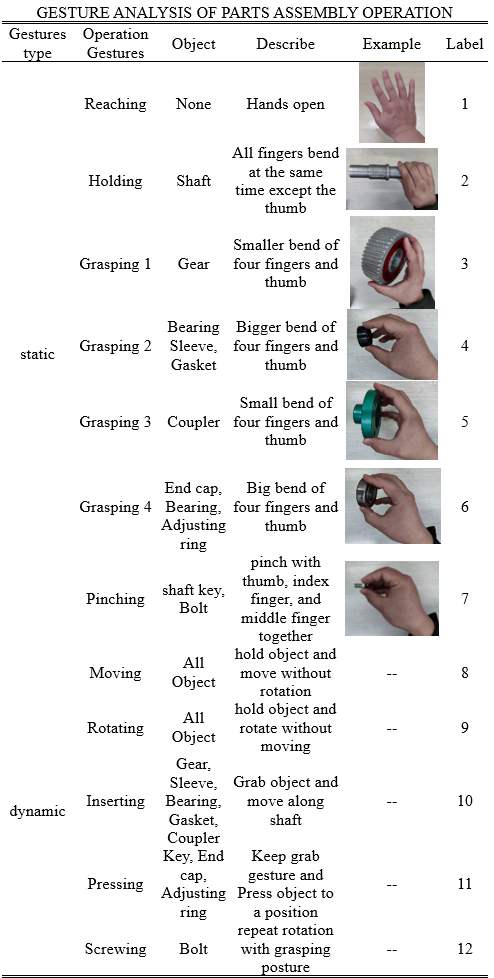
Assembly Gestures of the decelerator shaft parts
- Citation Author(s):
- Submitted by:
- yong liu
- Last updated:
- Fri, 08/26/2022 - 09:06
- DOI:
- 10.21227/gda4-8d15
- License:
 179 Views
179 Views- Categories:
- Keywords:
Abstract
The human hand is composed of distal phalanges, middle phalanges, proximal phalanges, and metacarpals except for the thumb which lacks the middle phalanges. A depth image sensor (Leap Motion) is used to extract the 3D gesture model parameters which includes finger joint coordinates of fingertip coordinates, distal finger joints, proximal finger joints, and finger root joint on the five fingers, the length of fingers, palm point coordinates, palm normal vector, and palm orientation (the direction from the palm to the fingers).static operation gestures include reaching, holding, grasping 1, grasping 2, grasping 3, grasping 4, and pinching
The human hand is composed of distal phalanges, middle phalanges, proximal phalanges, and metacarpals except for the thumb which lacks the middle phalanges. A depth image sensor (Leap Motion) is used to extract the 3D gesture model parameters which includes finger joint coordinates of fingertip coordinates, distal finger joints, proximal finger joints, and finger root joint on the five fingers, the length of fingers, palm point coordinates, palm normal vector, and palm orientation (the direction from the palm to the fingers).
Documentation
| Attachment | Size |
|---|---|
| 22.7 KB |





