*.mat

Recently, surface electromyogram (EMG) has been proposed as a novel biometric trait for addressing some key limitations of current biometrics, such as spoofing and liveness. The EMG signals possess a unique characteristic: they are inherently different for individuals (biometrics), and they can be customized to realize multi-length codes or passwords (for example, by performing different gestures).
- Categories:
 3106 Views
3106 Views
This dataset is used to design patent. The system is basic , as can be seen from figure.
There is related dataset- Data: 255W Panel Connected 72Ah Li-Ion.
This new datasets are needed to show that I know how to make simulation and the dataset of 'Data: 255W Panel Connected 72Ah Li-Ion' is not fake.
The boost converter, BMS is on existing designs.It is very simple for any graduate,degree holder or school students, so no paper is written for it.
- Categories:
741 Views
This dataset is in support of my 2 research papers ' '.
Preprint :
- Part I :
- Part II :
Related Claim : Novel ß Non-Linear Theory, Novel ß Solar Boost Converter and Novel ß Power Boost DC-DC Converter in Patent 'Novel ß 10-Axis Grid Compatible Multi-Controller'
- Categories:
1643 Views
This dataset is based on the ACFR Five Roundabouts Dataset. The original tracking data of over 23,000 traffic vehicles have been processed with an optimization-based filtering method to combat measurement noise and errors. Smooth velocity and acceleration signals are reconstructed. The processed recordings have then undergone a selection process using DBSCAN to remove the erroneous samples. The remaining samples contained in this dataset are considered representative of how average human drivers approach a roundabout scenario in daily driving.
- Categories:
458 Views
This is a dataset is an example of a distribution of 20 correlated Bernoulli random variables.
- Categories:
379 Views
This work provides the measurement data of sixteen high frequency (HF) radio frequency identification (RFID) transponder (tag) chips. In particular, the chip input impedance was characterized versus chip input voltage at 13.56 MHz. The measurement is based on the radio frequency current-voltage impedance measurement method and achieves, compared to previous work, higher measurement accuracy of lower than 1.5 %. The accompanying publication provides additional details.
- Categories:
207 Views
The objective of this dataset is the fault diagnosis in diesel engines to assist the predictive maintenance, through the analysis of the variation of the pressure curves inside the cylinders and the torsional vibration response of the crankshaft. Hence a fault simulation model based on a zero-dimensional thermodynamic model was developed. The adopted feature vectors were chosen from the thermodynamic model and obtained from processing signals as pressure and temperature inside the cylinder, as well as, torsional vibration of the engine’s flywheel.
- Categories:
5165 Views
The presented data contain recordings of underwater acoustic transmissions collected from a field experiment whose goal was to characterize self-interference for in-band full-duplex underwater acoustic communications. The experiment was conducted in the Lake of Tuscaloosa in July 2019. A single transmission-receiving line was deployed off a boat that was moored in the center of the lake. The transmission-receiving line had one acoustic transmitter and eight hydrophone receivers.
- Categories:
925 Views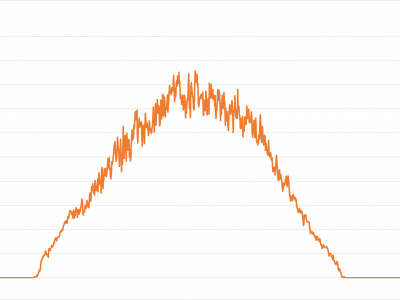
This dataset contains solar radiation data from Coto Laurel Puerto From May 20,2019 to May 19, 2020. Additional power ramp rate data is provided for seven different methods: Ramp saturation, first order low-pass filter, second order low-pass filter, moving average, exponential moving average, enhanced linear exponential smoothing, and predictive dynamics smoothing.
- Categories:
354 Views
This Matlab model and the included results are submitted as reference for the paper ''.
Presenting a comparative study of the Sequential Unscented Kalman Filter (SUKF), Least-squares (LS) Multilateration and standard Unscented Kalman Filter (UKF) for localisation that relies on sequentially received datasets.
The KEWLS and KKF approach presents a novel solution using Linear Kalman Filters (LKF) to extrapolate individual sensor measurements to a synchronous point in time for use in LS Multilateration.
- Categories:
99 Views