Artificial Intelligence

This paper conducts in-depth research on three text classification tasks: sentiment analysis, offensive language identification, and news topic classification.
- Categories:
 24 Views
24 Views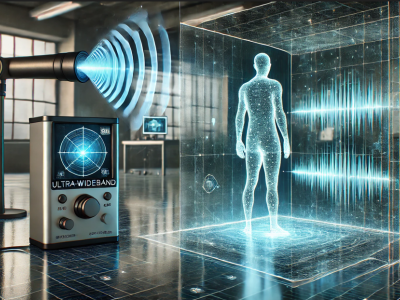
In this dataset, a human detecting model using with UWB radar technology is presented. Two distinct datasets were created using the UWB radar device, leveraging its dual features. Data collection involved two main scenarios, each containing multiple sub-scenarios. These sub-scenarios varied parameters like the position, distance, angle, and orientation of the human subject relative to the radar. Unlike conventional approaches that rely on signal processing or noise/background removal, this study uniquely emphasizes analyzing raw UWB radar data directly.
- Categories:
682 Views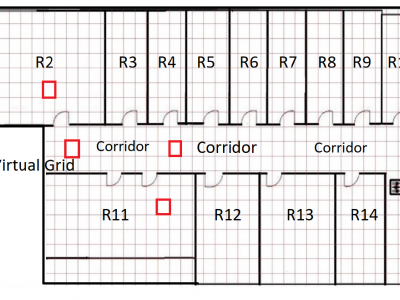
The JU-Impact Radiomap Dataset is a comprehensive dataset designed for research and development in indoor positioning systems. It comprises 5431 instances characterized by readings from 105 static Wi-Fi Access Points (APs) and spans 152 distinct virtual grids. Each virtual grid represents a 1x1 square meter area, derived by dividing a physical floor of a university building into reference coordinate points (x, y). The dataset was collected over a period of 21 days using four mobile devices: Samsung Galaxy Tab, Moto G, Redmi Note 4, and Google Pixel.
- Categories:
172 Views
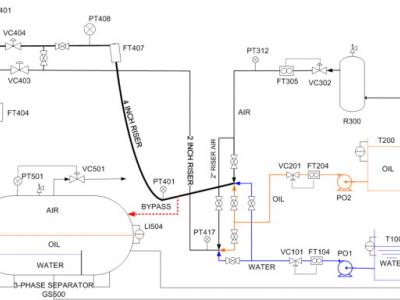
Dateset of the Three-Phase Flow Facility. The Three-phase Flow Facility at Cranfield University is designed to provide a controlled and measured flow rate of water, oil and air to a pressurized system. Fig. 1 shows a simplified sketch of the facility. The test area consists of pipelines with different bore sizes and geometries, and a gas and liquid two-phase separator (0.5 m diameter and 1.2 m high) at the top of a 10.5 m high platform. It can be supplied with single phase of air, water and oil, or a mixture of those fluids, at required rates.
- Categories:
302 ViewsWe propose MM-Vet v2, an evaluation benchmark that examines large multimodal models (LMMs) on complicated multimodal tasks. Recent LMMs have shown various intriguing abilities, such as solving math problems written on the blackboard, reasoning about events and celebrities in news images, and explaining visual jokes. Rapid model advancements pose challenges to evaluation benchmark development.
- Categories:
167 Views
This dataset is specifically designed for smart contract code search, aiming to facilitate research and development in this domain. To construct the dataset, we collected annotated Solidity smart contract code from two major sources: GitHub and Etherscan. In total, we compiled approximately 470K raw (code, docstring) pairs, ensuring a diverse and comprehensive dataset.
- Categories:
92 Views
Dataset 1 include 100 rebar-reinforced rectangular UHPC beams data.
- Categories:
25 Views
The analysis suggests various innovative ideas to improve English instruction, with an emphasis on current technologies and an inclusive approach. These include using AI as a peer tutor, exploring virtual reality to create immersive learning environments, analyzing data to create customized learning materials, integrating local cultural values into instructional materials, implementing a technology-based inclusive learning model, implementing a policy for digital advancement in education, and making the most of contemporary learning resources.
- Categories:
130 Views
Our paper presents a novel approach to enhance vulnerability descriptions using code-based methods for predicting missing phrase-based concepts. We leverage Large Language Models (LLMs) integrated with 1-hop relationship analysis to address hallucination issues. The code processes Textual Vulnerability Descriptions (TVDs) and extracts relevant security-related concepts such as vulnerability type, root cause, and impact. Our methodology involves generating predictions, verifying these with external knowledge sources, and filtering inaccurate results.
- Categories:
17 Views