model predictive control
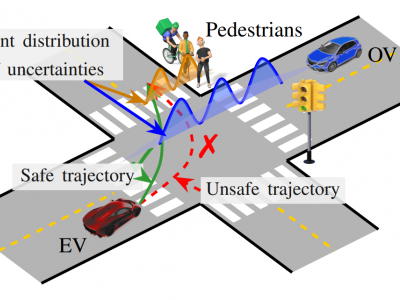
This paper develops a correct-by-design controller for an autonomous vehicle interacting with opponent vehicles with unknown intentions. We define an intention-aware control problem incorporating epistemic uncertainties of the opponent vehicles and model their intentions as discrete-valued random variables. Then, we focus on a control objective specified as belief-space temporal logic specifications. From this stochastic control problem, we derive a sound deterministic control problem using stochastic expansion and solve it using shrinking-horizon model predictive control.
- Categories:
 366 Views
366 Views
In this project, an LSTM-based Model Predictive Controller (LSTM-MPC), with 200 neurons of each layer, is designed to have a highly efficient control on the temperature. The resulted dataset is attached, for further considerations.
- Categories:
712 Views
The problem of cooling in rescue robots is similar to that of the entire domain of product development involving electronic systems. When considering mission-oriented rescue robots, this issue becomes more severe, as the tolerance to failure is remarkably low. While cooling is considered indispensable, the hazardous environmental condition of the scene of deployment, comprising of water, dust, toxic gases, or fire, constrains the choices of the method.
- Categories:
301 Views
This dataset is in support of my following Research papers
Preprint (Make sure you have read Caution) :
- Novel ß Transtibial Prosthetic 9-DoF Artificial Leg Adaptive Controller - Part I*
- Categories:
2201 Views
When batteries supply behind-the-meter services such as arbitrage or peak load management, an optimal controller can be designed to minimize the total electric bill. The limitations of the batteries, such as on voltage or state-of-charge, are represented in the model used to forecast the system's state dynamics. Control model inaccuracy can lead to an optimistic shortfall, where the achievable schedule will be costlier than the schedule derived using the model.
- Categories:
663 Views