Model Predictive Control Based Thermoelectric Cooling for Rough Terrain Rescue Robots
- Citation Author(s):
-
Mayur Kishore (Mahidol University)
- Submitted by:
- Mayur Kishore
- Last updated:
- DOI:
- 10.21227/8nsv-7x59
- Data Format:
- Research Article Link:
 303 views
303 views
- Categories:
- Keywords:
Abstract
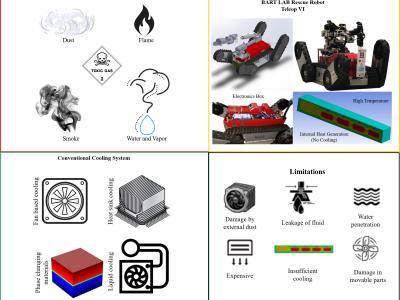
The problem of cooling in rescue robots is similar to that of the entire domain of product development involving electronic systems. When considering mission-oriented rescue robots, this issue becomes more severe, as the tolerance to failure is remarkably low. While cooling is considered indispensable, the hazardous environmental condition of the scene of deployment, comprising of water, dust, toxic gases, or fire, constrains the choices of the method. Hence, the usage of the atmospheric air intake for cooling purposes, which is prevalent among conventional cooling systems within robotics and electronics, may not be viable, demanding a control-volume cooling system. However, such methods involving active elements might be detrimental to energy consumption and ultimately to the rescue mission, since robots in these scenarios have to operate with limited energy availability. Therefore, considering these particular problems associated with rescue robots, this paper introduces and discusses the relevance of thermoelectric cooling in rescue robot systems employed in real-time rescue scenarios. Furthermore, to optimize the energy consumption cost, this paper proposes the use of Model Predictive Control (MPC) as the appropriate temperature control method for the thermoelectric element. The analysis includes Computational Fluid Dynamics (CFD)-based cooling analysis of the robot along with the comparative analyses of uncontrolled cooling and controlled cooling under different available control methods. The results suggest sufficient cooling performance along with optimum energy consumption for the proposed model when compared with other available scenarios, based on different parameters of performance.
Instructions:
Explanation of the datas within the excel sheet is described in the above text file.