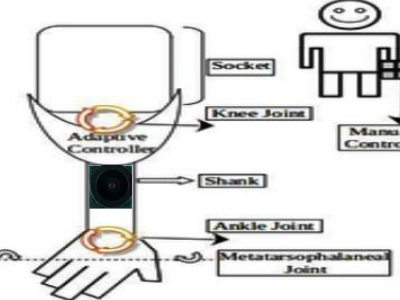
Data:Biomedical Artificial Leg (Prosthetics)
- Citation Author(s):
-
Abhishek Bansal

- Submitted by:
- Abhishek Bansal
- Last updated:
- DOI:
- 10.21227/249y-0611
- Data Format:
- Research Article Link:
- Links:
 2228 views
2228 views
- Categories:
- Keywords:
-
Abstract
This dataset is in support of my following Research papers
Preprint (Make sure you have read Caution) :
- Novel ß Transtibial Prosthetic 9-DoF Artificial Leg Adaptive Controller - Part I*
https://doi.org/10.36227/techrxiv.19758517.v1
- Novel ß Transtibial Prosthetic 9-DoF Artificial Leg Adaptive Controller - Part II*
https://doi.org/10.36227/techrxiv.19762762.v1
- Novel ß Transtibial Prosthetic 9-DoF Artificial Leg Adaptive Controller - Part III*
https://doi.org/10.36227/techrxiv.20813938.v1
- Novel ß Transtibial Prosthetic 9-DoF Artificial Leg Adaptive Controller - Part IV*
https://doi.org/10.36227/techrxiv.21180214.v1
* These papers if re-written will get replaced with new papers in version 2 which will have more information and will also reorganized.
In these paper series, the author has revealed complete modelling and algorithm with simulation success, which can be copied and implemented by readers in designing prototype.
Earlier this prototype was abandoned by the author due to finances and was submitted in 2018. https://www.element14.com/community/community/design-challenges/designforacause/blog/2018/07/18/design-journey-in-the-design-for-a-cause-artificial-stair-climbing-leg
From this kit, ADXL335, TMP36,HC-SRO4, LCD,MKR2UNO adapter, 32-bit ARM SAMD21 Cortex M0+ microprocessor are used. Other items are self- financed. The processor may get changed by AMD-Xilinx FPGA(subject to approval).
Script
ß Transtibial Prosthetic Artificial Leg MPC Controller https://doi.org/10.24433/CO.4724144.v1
Instructions:
********************************************************************************************
Caution
Though the uploaded data is true,designed for the real practical scenarios only, involving either human subjects or animals, these are neither been clinically tested nor have been practically tested on humans nor by any doctor or any medical or any review board. The author is not responsible if the algorithm is misunderstood or all this is copied without understanding or improperly implemented and mishappening due to it.The author is not responsible if the copied values cause mishappening.
********************************************************************************************
Read Me
(1) This neither contain any complete project folder nor any source code of project.
(2) Extra Libraries created, modified , other scripts , not shared, as very elementary for any graduate,degree holder but complete modelling and algorithm with simulation has been revealed.
(3) All work is simple , on basic and elementary concepts, can be easily copied, remade and understood.
(4) For other details like block/circuit diagram, set up, analysis, interpretation, parameters, mathematical formulae used to obtain these results etc. please refer "Research Paper".
(5) This is the last version and there won't be any other improvement or corrections or re-upload.
(6) Values of Kp, Ki, errors for controllers is given in Part-IV of Research paper.
(7) Calculations of dynamic forces is given in Part-I of Research paper.
(8) The dataset has been checked by the 'Data or Code or model Inspector' before uploading.
(9) .mat files can be converted to .csv or .xlsx or .xls, you can ask company engineer (they may even do) or you can even do yourself. Some softwares allow direct loading of .mat in their softwares.
(10) Some datasets are divided into with suffix 'X' and 'Y', for X-axis and Y-axis, which can be combined with elementary codes. If the same csv file is empty, then pls refer its mat file.
(11) If any problem in creating or copying, pls contact your university professor or board or any of the companies engineer.
(12) No other question or email will be replied.
(13) Make sure you have read Caution.
Dataset Files
Total Datasets = .
(1) Attached files are :
- Accelerometer_Stairs_ASC.zip
- Accelerometer_Stairs_DES.zip
- Accelerometer_Stairs_obstacle.zip
- Accelerometer_walking.zip
- Accelerometer_walking_obstacle.zip
- Ultrasonic_Stairs_ASC.zip
- Ultrasonic_Stairs_DES.zip
- Ultrasonic_walking_obstacles.zip
- Ultrasonic_Stair_obstacle_ASC.zip
- Ultrasonic_Stair_obstacle_DES.zip
- Respiration.zip
- Respiration_stairs.zip
- Respirating_walking_prosthetic.zip
- Respiration_stairs_prosthetic.zip
- Path1.csv
- Path2.csv
- Path3.csv
- Path1_Obstacle.csv
- Path3_Obstacle.csv
- Path1_AMPC.zip
- Path2_AMPC.zip
- Path3_AMPC.zip
- Path1_UKF.zip
- Path2_UKF.zip
- Path3_UKF.zip
- Path1_EKF.zip
- Path2_EKF.zip
- Path3_EKF.zip
- Path1_PF.zip
- Path2_PF.zip
- Path3_PF.zip
- PatellarReflexArcTest.zip
- KneeJointMotor_mat.zip
- KneeJointMotor_csv.zip
- AnkleJointMotor_rotor_angle.mat
- AnkleJointMotor_Vph.mat
- AnkleJointMotor_Iph.mat
- AnkleJointMotor_torque_electrical.mat
- AnkleJointMotor_rotor_speed.mat
- MetatarsophalanealJointMotor_Vph.mat
- MetatarsophalanealJointMotor_torque_electrical.mat
- MetatarsophalanealJointMotor_rotor_speed.mat
- MetatarsophalanealJointMotor_rotor_angle.mat
- MetatarsophalanealJointMotor_Iph.mat
(2) Five zip files are experimental data using sensors ADXL335 and HC-SRO4. The experimented collected zip files are -
(3)
(4) Accelerometer_Stairs_UP.zip is the accelerometer data collected.
(5) is the ultrasonic sensor without any obstacles (only stairs)
(6) is the accelerometer
(7 is the ultrasonic sensor with obstacles (detailes mentioned in Paper Part-IV)
(8) is the ultrasonic sensor with obstacles (only stairs).
(9) Path1, Path2,Path3 are the paths of Fig.1,Fig.2,Fig.3 described in the Research paper Part-IV. Path1 is walking prosthetic. Path2 is curved stair climbing, Path 3 is straight stairs in house with obstacles on stairs. All these three paths are result from simulation.
(10) Path 1 has 6 obstacles, Path 3 has 3 obtacles.
(11) Path1.csv, Path2.csv, Path3.csv has coordinates of followed path by leg.
(12) Path1_Obstacle.csv and Path3_Obstacle.csv are the coordinates of detected obstacles.
(13) Metatarsophalaneal Joints Motor has following 5 datasets
- MetatarsophalanealJointMotor_Vph.mat
- MetatarsophalanealJointMotor_torque_electrical.mat
- MetatarsophalanealJointMotor_rotor_speed.mat
- MetatarsophalanealJointMotor_rotor_angle.mat
- MetatarsophalanealJointMotor_Iph.mat
(14)
(15) Ankle Joints Motor has following 5 datasets
- AnkleJointMotor_rotor_angle.mat
- AnkleJointMotor_Vph.mat
- AnkleJointMotor_torque_electrical.mat
- AnkleJointMotor_rotor_speed.mat
- AnkleJointMotor_Iph.mat
(16) Knee Joints Motor has 4 zip datasets - KneeJointMotor_mat.zip, KneeJointMotor_csv.zip,KneeJointMotor_torque.csv.zip and KneeJointMotor_power.csv.zip. One has in .mat and other has in .csv. If the same csv file is empty, then pls refer its mat file.Both having same following datasets.
- Torque
- Power
- Id
- Iq
- smo_BodePlot
- smo_RootLocus
- smo_PoleZeroMap
- smo_NyquistPlot
- smo_NicholsChart
(17) 4 datasets - Torque, Power, Id, Iq in Knee Joints Motor- KneeJointMotor_mat.zip, KneeJointMotor_csv.zip, KneeJointMotor_torque.csv.zip and KneeJointMotor_power.csv.zip are speed characteristics. If the same csv file is empty, then pls refer its mat file.
(18) 5 datasets - smo_BodePlot, smo_RootLocus, smo_PoleZeroMap, smo_NyquistPlot, smo_NicholsChart in Knee Joints Motor- KneeJointMotor_mat.zip and KneeJointMotor_csv.zip are control characteristics for field oriented control with sliding mode observer. If the same csv file is empty, then pls refer its mat file.
(19) PatellarReflexArcTest is the Patellar Reflex Arc Test on the knee joint PNS
- smo_UnitStepX
- smo_UnitStepY
- smo_ImpulseX
- smo_ImpulseY
(20)
Path1_AMPC.zip, Path2_AMPC.zip, Path3_AMPC.zip are determined by adaptive model predictive control. Each of these zip has following datasets.
- slope
- intercept
- detection
- trajectory
- sim_distance
How use Dataset Files
The data can be studied and used in various ways.
(1) The values given in the dataset or in the Research paper can be used by doctors, manufacturers, R&D engineers etc.
(2) The dataset and Research paper can be used to design more variants.
(3) The dataset and Research paper can be used for study using less engineering knowledge or with open-source softwares.
(4) There are many data analysis softwares - proprietary and open source softwares.
(5) The dataset can be loaded into proprietary softwares or trial versions of Finite element or other simulation softwares to regenerate same model or other model or to conduct other study.
(6) One particular study or some experiments can be copied for degree thesis, project or phd thesis.
Paper Citing : If want to cite this in paper etc. ,please refer DoI and/or this url.
Funding: There are no full-funders for this submission. I expect all these papers, would be nice Shroud for the passion and the price paid.
Acknowledgement : The concerened names have been acknowledged in the Research paper and data. Other items are self- financed.
Dataset Files
- AnkleJointMotor_Iph.mat (70.72 MB)
- AnkleJointMotor_Vph.mat (68.17 MB)
- AnkleJointMotor_rotor_angle.mat (27.17 MB)
- AnkleJointMotor_rotor_speed.mat (33.13 MB)
- AnkleJointMotor_torque_electrical.mat (36.28 MB)
- MetatarsophalanealJointMotor_Iph.mat (27.79 MB)
- MetatarsophalanealJointMotor_Vph.mat (24.58 MB)
- MetatarsophalanealJointMotor_rotor_angle.mat (10.87 MB)
- MetatarsophalanealJointMotor_rotor_speed.mat (11.44 MB)
- MetatarsophalanealJointMotor_torque_electrical.mat (12.7 MB)
- Path1.csv (1.66 KB)
- Path1_Obstacle.csv (56 bytes)
- Path2.csv (285 bytes)
- Path3.csv (618 bytes)
- Path3_Obstacle.csv (26 bytes)
- kneejoint_csv.zip (5.99 MB)
- kneejoint_mat.zip (4.28 MB)
- output_result_fakempcleg (1.28 GB)
- patellarreflexarctest.zip (1.4 MB)
- result_fakempcleg.zip (20.99 MB)













For new work, pls refer 'Data:B-Bio Models-1 , 'Data:B-Bio Models-2' and Data : B-Machines.
There is new work on this, for it pls refere Data:B-Bio Models or Data : B-Machines , preprint, and/or open-access
Data : B-Machines