Intention-Aware Control Based on Belief-Space Specifications and Stochastic Expansion
- Citation Author(s):
-
Zengjie Zhang
 (Eindhoven University of Technology)
(Eindhoven University of Technology)
- Submitted by:
- Zengjie Zhang
- Last updated:
- DOI:
- 10.21227/d5yc-pn12
- Data Format:
 370 views
370 views
Abstract
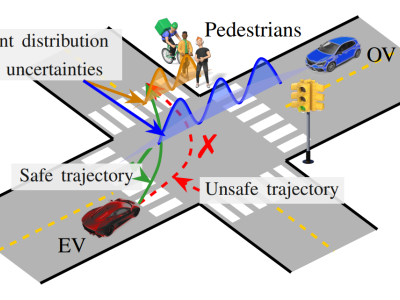
This paper develops a correct-by-design controller for an autonomous vehicle interacting with opponent vehicles with unknown intentions. We define an intention-aware control problem incorporating epistemic uncertainties of the opponent vehicles and model their intentions as discrete-valued random variables. Then, we focus on a control objective specified as belief-space temporal logic specifications. From this stochastic control problem, we derive a sound deterministic control problem using stochastic expansion and solve it using shrinking-horizon model predictive control. The solved intention-aware controller allows a vehicle to adjust its behaviors according to its opponents' intentions. It ensures provable safety by restricting the probabilistic risk under a desired level. We show with experimental studies that the proposed method ensures strict limitation of risk probabilities, validating its efficacy in autonomous driving cases. This work provides a novel solution for the risk-aware control of interactive vehicles with formal safety guarantees.
Instructions:
The benchmark of using polynomial chaos expansion (PCE) to solve intention-aware control of autonomous vehicles. Also, refer to the latest version in our GitHub repo.
Requirements
Operating system
- Windows (compatible in general, succeed on 11)
- Linux (compatible in general, succeed on 20.04)
MacOS (compatible in general, succeed on 13.4.1)
Python Environment
Python
3.11- Required Packages:
numpy,numpoly,scipy,treelib,matplotlib,importlib-metadata.
Required Libraries
gurobipysolver (license required, see How to Get a Gurobi License)stlpytoolbox (see Documentation or GitHub repository)chaospytoolbox (see Documentation or GitHub repository)
Quick Installation
Install conda following this instruction;
Open the conda shell, and create an independent project environment;
conda create --name intentaware python=3.11In the same shell, activate the created environment
conda activate intentawareIn the same shell, within the
intentawareenvironment, install the dependencies one by oneconda install -c anaconda numpy conda install -c conda-forge numpoly conda install -c anaconda scipy conda install -c conda-forge treelib conda install -c conda-forge matplotlib conda install -c conda-forge importlib_metadataIn the same shell, within the
intentawareenvironment, install the librariesgurobipy,stlpy, andchaospy:python -m pip install gurobipy pip install stlpy pip install chaospyLast but not least, activate the
gurobilicense (See How To). Note that this project is compatible withgurobiReleased version11.0.1. Keep yourgurobiupdated in case of incompatibility.
Run Examples
- Lead to the
exampledirectory; - Lead to the
overtakingor theintersectionfolder; - Run the main script
main.py; - Rendering constraints may take up to 1 to 2 minutes, depending on the computational performance;
- Plotted figures automatically saved in the
datasubfolder.
License
This project is with a BSD-3 license.