Climate Change/Environmental

A new small aerial flame dataset, called the Aerial Fire and Smoke Essential (AFSE) dataset, is created which is comprised of screenshots from different YouTube wildfire videos as well as images from FLAME2. Two object categories are included in this dataset: smoke and fire. The collection of images is made to mostly contain pictures utilizing aerial viewpoints. It contains a total of 282 images with no augmentations and has a combination of images with only smoke, fire and smoke, and no fire nor smoke.
- Categories:
 815 Views
815 Views
Due to climate change, the Northwesterner Gilgit Baltistan's, Ghizer district is highly susceptible to glacial lake outburst floods (GLOFs). Nearly 24 GLOFs have occurred in this area in the last ∼200 years, demonstrating the growing recurrent nature of these incidents. Taking this into account, the assessment of risks associated with GLOFs was investigated in this study. All regional glacial lakes were identified in the first phase, and changes between 2000 and 2023 were mapped using moderate-resolution satellite images (Landsat).
- Categories:
123 Views
Beijing, Hangzhou, Shenzhen, and Chongqing. For each city, a total of 4337 hourly AQI records from January 1, 2024, to June 29, 2024, were selected. In Beijing, the primary observation point was the Tiantan observatory, with auxiliary observation points at Wanshouxigong, Guanyuan, and Olympic Sports Center. Similarly, in Hangzhou, the main observation point was the City Government Building, and auxiliary observation points were Binjiang, Xisha, and Yunqi. In Shenzhen, the main observation point was Longgang, with auxiliary observation points at Overseas Chinese Town, Guanlan, and Xixiang.
- Categories:
42 Views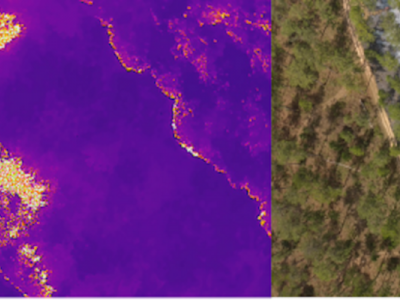
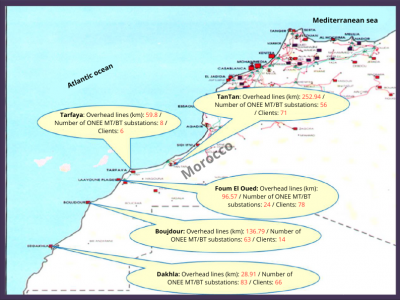
This dataset supports the manuscript titled “Strategies for Mitigating Degradation of Medium Voltage Electrical Equipment in Harsh Saline Environments.” The study focuses on identifying and addressing the challenges faced by medium voltage equipment in coastal environments characterized by high salinity, humidity, and extreme weather conditions. The dataset includes:
- Categories:
109 Views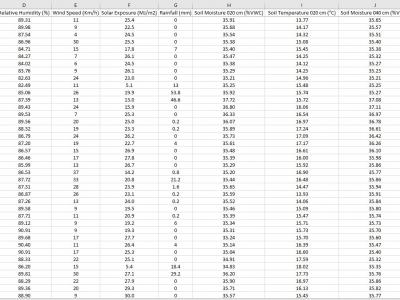
The data is collected from the deployed IoT sensor node at a pilot farm in Narrabri, Australia. The dataset includes information about soil characteristics such as soil moisture and soil temperature at 20-40-60 cm depth. The sensor node also provides information about environmental influencers, which are critical in constructing machine learning models to predict Evapotranspiration in diverse soil and environmental conditions.
- Categories:
790 Views

Image Source : Some news of solar panel catching fire (lost original source but can be searched on google).
This dataset webpage contains datasets of existing and proposed models
- Categories:
316 Views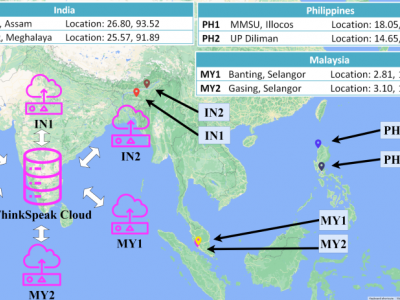
The data used in this work is collected using the AirBox Sense system developed to detect six air pollutants, ambient temperature, and ambient relative humidity. The pollutants are Nitrogen Dioxide (NO2), surface Ozone (O3), Carbon Monoxide (CO), Sulphur Dioxide (SO2), Particulate Matter (PM2.5, and PM10). The sensors monitor these pollutants in real-time and store them in a cloud-based platform using a cellular module. Data are collected every 20 seconds, producing 4320 readings each day.
- Categories:
283 Views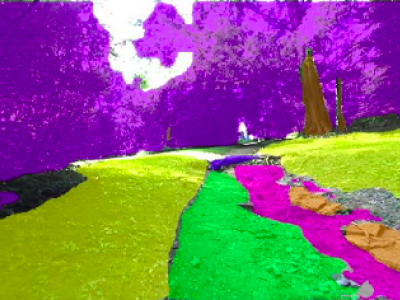
This work presents a specialized dataset designed to advance autonomous navigation in hiking trail and off-road natural environments. The dataset comprises over 1,250 images (640x360 pixels) captured using a camera mounted on a tele-operated robot on hiking trails. Images are manually labeled into eight terrain classes: grass, rock, trail, root, structure, tree trunk, vegetation, and rough trail. The dataset is provided in its original form without augmentations or resizing, allowing end-users flexibility in preprocessing.
- Categories:
601 Views