Energy
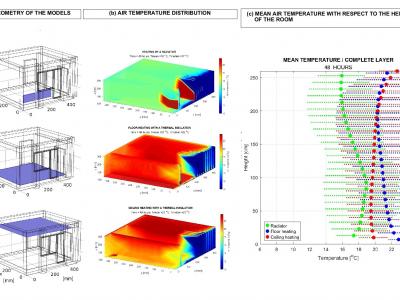
Numerical simulations are used to assess the efficiency of floor heating, ceiling heating, and plane radiator heating in a selected family house room under winter conditions in the Central European climate zone. COMSOL Multiphysics software was used for computer simulations. The output data were subsequently processed and analyzed using MATLAB software. Results indicate that floor and ceiling heating systems achieve higher and more rapid temperature increases compared to plane radiators.
- Categories:
 162 Views
162 Views
This dataset comprises Bloomberg Terminal data from 2017 to 2021, detailing environmental footprints, disclosure practices, risk profiles, and ESG fund commitments of Fortune 500 companies. The data captures various dimensions of environmental, social, and governance (ESG) performance, providing a comprehensive view of corporate sustainability trends. It includes quantitative indicators and qualitative scores for companies' ESG strategies, enabling researchers to analyze ESG practices and trends over time.
- Categories:
178 Views
Well logs are interpreted/processed to estimate the in-situ reservoir properties (petrophysical, geomechanical, and geochemical), which is essential for reservoir modeling, reserve estimation, and production forecasting. The modeling is often based on multi-mineral physics or empirical formulae. When sufficient amount of training data is available, machine learning solution provides an alternative approach to estimate those reservoir properties based on well log data and is usually with less turn-around time and human involvements.
- Categories:
198 Views
This paper presents a method for modeling and simulating three-phase grid-connected solid-oxide fuel cell systems in the Matlab/Simulink environment. The approach is utilized to analyze the interaction between solid-oxide fuel cells and the electrical power system, focusing on understanding the dynamics of the electrochemical reaction and its impact on the performance of grid-connected fuel cell systems. The results highlight the effectiveness of the proposed method in accurately modeling and operating three-phase grid-connected solid-oxide fuel cell systems.
- Categories:
194 Views
This dataset webpage contains datasets of exisiting and proposed models:
- centrifugalpump1.zip
- centrifugalpump2.zip
- centrifugalpump3.zip
B Model of Fault And Short-Circuit Analysis of Centrifugal Pump
presented in my last Speaker Presentation in Conference - 2025*.
- Categories:
395 Views
This dataset webpage contains datasets and models
- inductionmotor1.zip
- inductionmotor2.zip
- inductionmotor3.zip
- pmsm1.zip
- pmsm2.zip
- pmsm3.zip
- BLDC1.zip
- BLDC1.zip
presented in my 3rd last Speaker Presentation in Conference - 2025*.
- Categories:
394 Views
Image Source : Some news of solar panel catching fire (lost original source but can be searched on google).
This dataset webpage contains datasets of existing and proposed models
- Categories:
310 Views
Electric Vehicles Charging Station with Photovoltaic Panels
This dataset contains the model and simulation output results in Matlab/Simulink of a three-phase grid-connected charging station with PV panels for electric vehicles realized in a work submitted to the 13th IEEE International Conference and Exposition on Electrical and Power Engineering EPEi 2024, Iasi, Romania, October 17-19, 2024 (https://www.epe.tuiasi.ro/).
- Categories:
507 Views
Growth in agricultural produce processing will summon deeper exploitation of energy resources and influence climate change. Fruits are among the agricultural produce that require processing for value addition and extension of their shelf-life. However, their processing generates a sizeable amount of waste, creating a waste management problem, yet organic waste can be converted into suitable energy carriers. In this study, briquettes were developed from orange, mango, and jackfruit wastes.
- Categories:
137 Views
The dataset includes the regulatory, utility and DGENCO data for distribution planning for a utility under regulated monopoly. The regulatory data includes benchmark EENSC values, and elasticity values. The utility data involves bus, and prospective branch data. The load data corresponds to increase in load with respect to planning stages. The branch data corresponds to all candidate branch locations of all types. The DGENCO data corresponds the candidate DG locations with maximum size of each Distributed Generation.
- Categories:
91 Views