Artificial Intelligence
4000 Naver Shopping Reviews with review stars and number of images
- Categories:
 9 Views
9 Views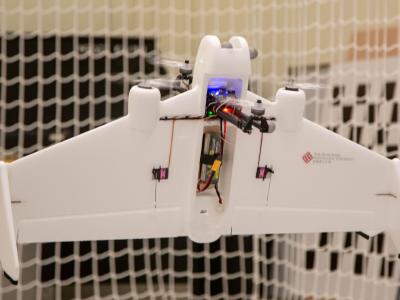
This dataset is gathered for quadrotor tail-sitter UAV system identification and modeling by PolyU MAV/UAV Lab. Various operating conditions are recorded during the UAV hovering phase.
- Categories:
532 Views
The Framingham Township Heart Institute offers a 10-year data set on coronary heart disease
- Categories:
1814 Views
This dataset is Bill Proposal History of the Republic of Korea 20th National Assembly(2016-2020) Lawmakers. This dataset consists of 21,594 rows with 37 columns. Contents are mainly written in korean, so translation will be needed for foreign researchers. If any further instruction or information is needed, contact by minhan.nick.cho@gmail.com.
- Categories:
112 Views
Please cite the following paper when using this dataset:
N. Thakur and C.Y. Han, “An Exploratory Study of Tweets about the SARS-CoV-2 Omicron Variant: Insights from Sentiment Analysis, Language Interpretation, Source Tracking, Type Classification, and Embedded URL Detection,” Journal of COVID, 2022, Volume 5, Issue 3, pp. 1026-1049
Abstract
- Categories:
1721 Views
It contains two parts of sound and video, and they are in one-to-one correspondence.It is used for emotion recognition for speech and video and contains nine emotions.
搜索
复制
- Categories:
203 Views
The files contain the results and control software associated with our research paper.
We address the problem of designing a modular method for the automatic design of robot swarms, which involves defining the modules that will be then automatically selected and assembled into an appropriate architecture (e.g., a finite-state machine or a behavior tree).
This data is associated with a paper in which we propose a method based on repertoires of neural networks automatically generated via a quality-diversity evolutionary algorithm.
- Categories:
31 Views
This dataset contains pipe images straight, right and left curves to support AUV navigation based on image.
- Categories:
716 Views
UDQ-based POE formula for the kinematic calibration of articulated robot
- Categories:
82 Views
Please cite the following paper when using this dataset:
N. Thakur, “A Large-Scale Dataset of Twitter Chatter about Online Learning during the Current COVID-19 Omicron Wave,” Journal of Data, vol. 7, no. 8, p. 109, Aug. 2022, doi: 10.3390/data7080109
Abstract
- Categories:
1011 Views