Machine Learning
Anomaly detection plays a crucial role in various domains, including but not limited to cybersecurity, space science, finance, and healthcare. However, the lack of standardized benchmark datasets hinders the comparative evaluation of anomaly detection algorithms. In this work, we address this gap by presenting a curated collection of preprocessed datasets for spacecraft anomalies sourced from multiple sources. These datasets cover a diverse range of anomalies and real-world scenarios for the spacecrafts.
- Categories:
 835 Views
835 Views
To access this dataset without purchasing an IEEE Dataport subscription, please visit: https://zenodo.org/doi/10.5281/zenodo.11711229
Please cite the following paper when using this dataset:
- Categories:
1030 Views
This data is the reanalysis of sea surface temperature provided by Extended Reconstruction Sea Surface Temperature version 5 (ERSST v.5) from January 1854 to December 2022, Hadley Centre Global Sea Ice and Sea Surface Temperature (HadISST) from January 1870 to December 2022, and COBE-SST2 Sea Surface Temperature and Ice (COBE-SST2) from January 1854 to December 2022. All data is re-gridded to have the same spatial resolution of 2.0° × 2.0°, and the grid spans from 88°N to 88°S and 0°E to 358°E via bilinear interpolation from the initial grid. This dataset is in NetCDF4 format.
- Categories:
117 Views
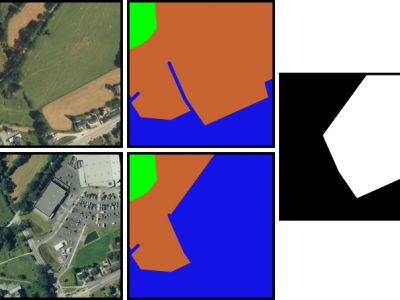
Image representation of Malware-benign dataset. The Dataset were compiled from various sources malware repositories: The Malware-Repo, TheZoo,Malware Bazar, Malware Database, TekDefense. Meanwhile benign samples were sourced from system application of Microsoft 10 and 11, as well as open source software repository such as Sourceforge, PortableFreeware, CNET, FileForum. The samples were validated by scanning them using Virustotal Malware scanning services. The Samples were pre-processed by transforming the malware binary into grayscale images following rules from Nataraj (2011).
- Categories:
517 Views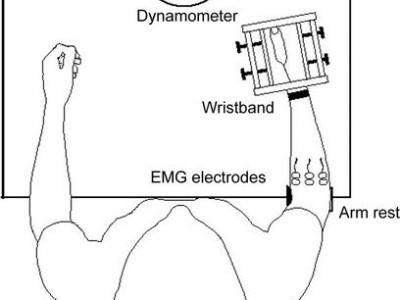
This data was recorded for emg based force/Torque estimation. EMG and torque signals were collected during simultaneous, isometric, but continuously varying contractions, corresponding to two wrist DoF. The experiment was carried out in two trials with a 5-min rest in between. Each trial included six combinations of tasks, separated by 2 min of rest to minimize the effect of fatigue. The performed tasks were categorized into individual and combined (simultaneous) DoF to test the ability to estimate isolated torque and torque in two simultaneous DoF.
- Categories:
289 Views
This paper focuses on advancements in predictive maintenance driven by artificial intelligence (AI), machine learning (ML), and the Internet of Things (IoT). It explores applications in the predictive maintenance in industries, aiming to provide a comprehensive understanding of current methodologies and future prospects. The discussion focuses on predictive maintenance methodologies, highlighting strengths, limitations, challenges, and opportunities.
- Categories:
240 Views
Wi-Fi FTM RSSI Localization dataset
Wi-Fi Fine Time Measurement for positioning / Indoor Localization in 3 different locations and using 8 different APs
Custom APs using ESP32C3 and Raw FTM is measured in nanoseconds
Data is only measured at the Router Side
Data is not measured at client side
Has 4 datasets inside the zip folder with over 100,000 data points
Contains processed Wi-Fi FTM packets from various routers in:
- Categories:
1557 Views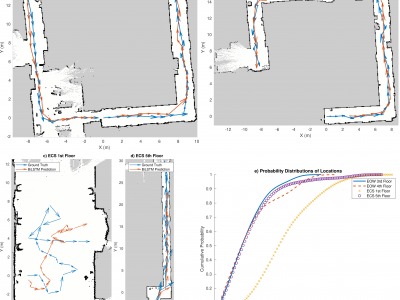
Wi-Fi BLE RSSI SQI Localization dataset
Wi-Fi BLE RSSI for positioning / Indoor Localization in 4 different locations and using 18 different APs
Data is only measured at the Router Side
Data is not measured at client side
Has 12 datasets inside the zip folder with over 1,000,000 data points
- Categories:
1037 Views
This is the official Thaat and Raga Forest (TRF) Dataset
Please do cite our paper: Link to Paper
Dataset is also available here: Link to Dataset
- Categories:
1214 Views
Student learning willingness is the decisive factor for achieving the final learning outcomes in curriculum teaching. On the other hand, the final learning outcomes achieved by students in the curriculum are a true reflection of student learning willingness. This paper selects 6 types of theoretical teaching method data and 4 types of student engagement behavior data used in the teaching process of the "Computer Systems" course in the Software Engineering major of Information Engineering School in the academic years 2021, 2022, and 2023 as the basic data.
- Categories:
403 Views