Transportation

Self-Reconfigurable Modular robotic Systems (SRMSs) can physically connect and form a variety of morphologies without the need for external intervention. The morphology transformation problem of an underwater SRMS is critical to various functionalities. Morphology decomposition and reconnections are reduced by clustering some modules together. The file includes the x and y coordinates of modules in a self-reconfigurable robotic system.
- Categories:
 45 Views
45 Views
The TiHAN-V2X Dataset was collected in Hyderabad, India, across various Vehicle-to-Everything (V2X) communication types, including Vehicle-to-Vehicle (V2V), Vehicle-to-Infrastructure (V2I), Infrastructure-to-Vehicle (I2V), and Vehicle-to-Cloud (V2C). The dataset offers comprehensive data for evaluating communication performance under different environmental and road conditions, including urban, rural, and highway scenarios.
- Categories:
1278 Views
This dataset webpage contains datasets of exisiting and proposed models:
- 12cell.zip
- 16cell.zip
- 36cell.zip
- Proposed_
Presented in my 2nd (may be last) keynote Speaker Presentation in Conference - 2025*.
Novel Perspective of Contemplating Existing Principles of Scientific Truth : Novel B-Unified Theory, Postulates, Propositions And Models With Applications in Impedance, Transformers, Inverters, Generators, Pumps, Solar, Machinery, Turbines, SMPS and Short Circuit Analysis
- Categories:
558 Views
This dataset webpage contains datasets of existing and proposed models
- 4cell.zip
- 6cell.zip
- 8cell.zip
Presented in my 3rd Speaker Presentation in Conference - 2025*.
- Categories:
311 Views
This dataset webpage contains datasets of exisiting and proposed models:
- tubular.zip
- tubular2.zip
- tubular3.zip
B Model of Fault And Short-Circuit Analysis of Synchronous Generator
presented in my 3rd Probably last Speaker Presentation in Conference - 2025*.
- Categories:
418 Views
This dataset webpage contains datasets and models
- inductionmotor1.zip
- inductionmotor2.zip
- inductionmotor3.zip
- pmsm1.zip
- pmsm2.zip
- pmsm3.zip
- BLDC1.zip
- BLDC1.zip
presented in my 3rd last Speaker Presentation in Conference - 2025*.
- Categories:
476 Views
Each HistDataX.csv file refers to a set of historical data.
Each column refers to an attribute, including:
Driving distance (km),
Vehicle speed (km/h),
Motor output power (W),
Acceleration padel position (%),
Traffic status (0, 1, 2,…, 4; the bigger, the heavier),
Traffic jam direction (-1 opposite direction, 0 unknown, 1 same direction),
Traffic flow speed (km/h).
The sample rate is 10 Hz.
- Categories:
168 Views
Sea-rail intermodal transportation is an essential infrastructure in global supply chains nowadays. Since the yard is the interface between sea and land, optimizing the transportation process in yards is of significant interest for increasing transportation efficiency.
- Categories:
135 Views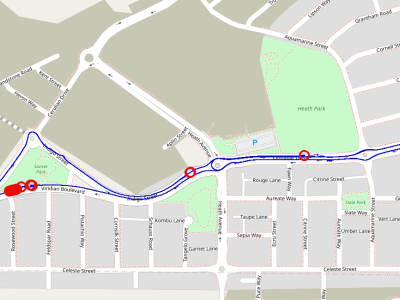
**Abstract**
- Categories:
512 Views
For optimizing RSU deployment, comprehensive data is essential. Geographical data includes detailed road network topology, traffic flow patterns, and geographic coordinates. Communication range data covers effective ranges of RSUs and connected vehicles, considering signal strength and environmental conditions. Vehicle data involves classifications based on communication capabilities and percentages of connected vehicles. Network performance data includes latency requirements, packet loss rates, and bandwidth needs.
- Categories:
104 Views