Digital signal processing
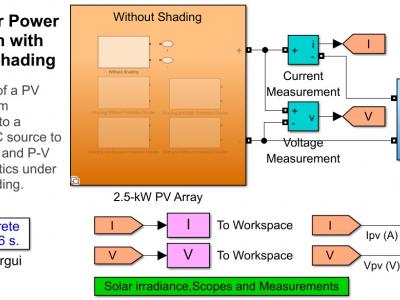
PV Solar Power System Under Partial Shading Irradiance Conditions
Operation of a solar photovoltaic (PV) array connected to a variable DC source to plot the l-V and P-V characteristics under partial shading irradiance conditions.
- Categories:
 682 Views
682 Views
It is suggested to use zero crossing detectors to build a high-precision power-factor meter. Low pass filters are suggested to stop this error source after the influence of input signal distortion is examined. Based on the measurement of voltage, current, and power factor, this system is also proposed as a new type of power standard meter.
- Categories:
52 Views
This dataset contains inertial measurements data (accelerometer, gyroscope and magnetometer), recorded as a part of DoorINet research. Our dataset was recorded using two types of IMUs: Memsense MS-IMU3025 [32] and Movella Xsens DOT [33]. The Memsense MS-IMU3025 was used to generate the ground-truth (GT) readings. This IMU has a gyroscope bias instability of 0.8°/h over the axis of interest Z and was recorded at 250Hz. The Movella Xsens DOT IMUs were used as units under test. It has a gyroscope bias instability of 10°/h over the axis of interest Z and was recorded at 120Hz.
- Categories:
10 Views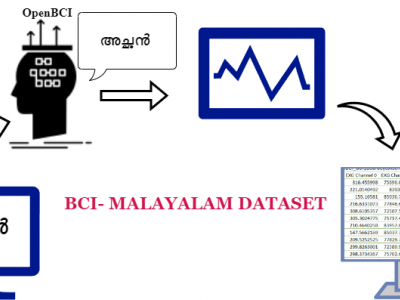
In today’s context, it is essential to develop technologies to help older patients with neurocognitive disorders communicate better with their caregivers. Research in Brain Computer Interface, especially in thought-to-text translation has been carried out in several languages like Chinese, Japanese and others. However, research of this nature has been hindered in India due to scarcity of datasets in vernacular languages, including Malayalam. Malayalam is a South Indian language, spoken primarily in the state of Kerala by bout 34 million people.
- Categories:
940 Views
Automatic white balance (AWB) is an important module for color constancy of cameras. The classification of the normal image and the color-distorted image is critical to realize intelligent AWB. One tenth of ImageNet is utilized as the normal image dataset for training, validating and testing. The distorted dataset is constructed by the proposed theory for generation of color distortion. To generate various distorted color, histogram shifting and matching are proposed to randomly adjust the histogram position or shape.
- Categories:
282 Views
The article presents a performance analysis of fully automated, in-house developed 2D ultrasound computerized tomography systems using different programming languages. The system is fully automated in four programming languages: LabVIEW, MATLAB, C and Python. It includes codes for sensors, instruments interfacing, real-time control, synchronized data acquisition, simultaneous raw data processing and analysis. A microcontroller integrated, multi-actuator based electro-mechanical assembly designed to provide complete scanning in three dimensions.
- Categories:
36 Views
Dataset1
- Categories:
357 Views
A 5.76-second piano rendition of the Inspector Gadget Theme with a sampling rate of 44.1 kHz, played 2 mm from the multi-mode fiber. High-speed infrared camera data, derived from sound sampled at 1.93 kHz, consists of 10,000 frames capturing vibrations on a multi-mode fiber. It includes 128*8 pixel data and can be monitored, played, and processed through MATLAB.
- Categories:
27 Views
This dataset contains the synthetic stimuli used in the study published in the paper "A Comparative Study of 3D and 1D Acoustic
Simulations of the Higher Frequencies of Speech". The goal of this study was to evaluate the accuracy of the acoustic wave
propagation in the vocal tract in a source-filter synthesis paradigm with two perceptual experiments. The high frequencies (above 4 kHz) of the stimuli were
generated by three different methods: a source-filter method relying on a 1D and a 3D acoustic model, and a bandwith extension
- Categories:
89 Views
The "Queue Waiting Time Dataset" is a detailed collection of information that records the movement of waiting times in queues. This dataset contains important details such as the time of arrival, the start and finish times, the waiting time, and the length of the queue. The arrival time denotes the moment when customers enter the queue, while the start and finish times track the duration of the service process. The waiting time measures the time spent waiting in the queue, and the queue length shows the number of customers in the queue when a new customer arrives.
- Categories:
3278 Views