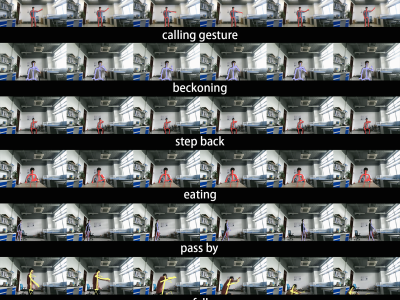
Most of the existing human action datasets are common human actions in daily scenes(e.g. NTU RGB+D series, Kinetics series), not created for Human-Robot Interaction(HRI), and most of them are not collected based on the perspective of the service robot, which can not meet the needs of vision-based interactive action recognition.
This dataset is named as “Human-Robot Interactive Action Dataset From The Perspective Of Service Robot (THU-HRIA dataset) “ ,which is created for indoor service robot action interaction, collected by Tsinghua University.
- Categories: