Machine Learning

In our study, datasets of two simulators, namely phasor-based simulator and hybrid-type simulator are used. In the hybrid environment, first, the outputs of the phasor-based simulator are converted to instantaneous waveforms, then based on instruction, distortions and noises are added (superimposed) to these waveforms, and finally, the distorted waveforms are fed to the detailed model of PMUs simulated in EMT domain. Outputs of both simulators can be found in the submitted file.
- Categories:
 647 Views
647 Views
The availability of labelled Cyber Bulling Types dataset has been exhibited for high profile Natural Language Processing (NLP), which constantly leads the advancement of constructing and model creation-based text. I aim at extracting diverse and efficient Cyber Bully Tweets from the Twitter Social Media Platform. This dataset contains 5 types of cyber bullying samples. They are
1. Sexual Harassment
2. Doxing
3. Cyberstalking
- Categories:
6690 Views
Aspect Sentiment Triplet Extraction (ASTE) is an Aspect-Based Sentiment Analysis subtask (ABSA). It aims to extract aspect-opinion pairs from a sentence and identify the sentiment polarity associated with them. For instance, given the sentence ``Large rooms and great breakfast", ASTE outputs the triplet T = {(rooms, large, positive), (breakfast, great, positive)}. Although several approaches to ASBA have recently been proposed, those for Portuguese have been mostly limited to extracting only aspects without addressing ASTE tasks.
- Categories:
525 Views
The dataset contains the navigation measurements obtained in the indoor experiment field. The volunteers move on the whole 4th floor of the Building D of Dong Jiu Teaching classes at Huazhong University of Science and Technology. Meanwhile, the experimental area consists of a total area of 717 m 2. These datasets were used and can be used to test and validate the radio map database updating-based localization positioning algorithm through the RSSI signals space.
- Categories:
1382 Views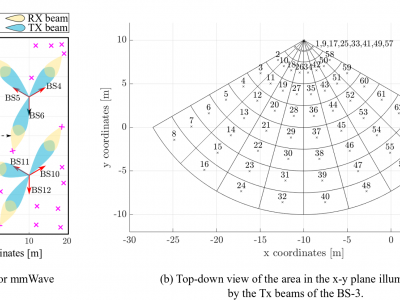
This dataset includes the measured Downlink (DL) signal-to-noise ratios (SNRs) at the User Equipments (UEs), adopting one of the beams of the beamforming codebook employed at the Base Stations (BSs). First, we configured a system-level simulator that implements the most recent Third Generation Partnership Project (3GPP) 3D Indoor channel models and the geometric blockage Model-B to simulate an indoor network deployment of BSs and UEs adopting Uniform Planar Arrays (UPAs) and a codebook based transmission.
- Categories:
624 Views
This dataset consists of real paddy field images taken from various heights under variable natural lighting conditions. Also, this dataset consists of images with water and soil background removed and annotated images, representing different kinds of plants (paddy, weeds of paddy such as grass, broadleaved weed, sedges) in different color for groundtruth.
- Categories:
4167 Views
Most of Facial Expression Recognition (FER) systems rely on machine learning approaches that require large databases (DBs) for an effective training. As these are not easily available, a good solution is to augment the DBs with appropriate techniques, which are typically based on either geometric transformation or deep learning based technologies (e.g., Generative Adversarial Networks (GANs)). Whereas the first category of techniques have been fairly adopted in the past, studies that use GAN-based techniques are limited for FER systems.
- Categories:
2068 Views
The time-to-market pressure and the continuous growing complexity of hardware designs have promoted the globalization of the Integrated Circuit (IC) supply chain. However, such globalization also poses various security threats in each phase of the IC supply chain. Although the advancements of Machine Learning (ML) have pushed the frontier of hardware security, most conventional ML-based methods can only achieve the desired performance by manually finding a robust feature representation for circuits that are non-Euclidean data. As a result, modeling these circuits using graph learning to imp
- Categories:
2561 Views
This dataset includes time-series motion data of a hexapod walked by CPGs.
Each trajectory has 500 steps of 18-dimensional observed joint angles and 18 reference joint angles as state; and six commands to CPGs as action.
150 trajectories for training, 25 trajectories for validation, and 25 trajectories for test are seperately summarized in the respective files.
- Categories:
85 Views
In Indian sub-continent COVID-19 second wave started in early March 2021 and its effect was more lethal than the first wave, the confirmed cases and the death rate was higher than in the first wave. Unlike the national lockdown in 2020, this year different states have started imposing lockdown like restrictions spanning April-June 2021. This paper investigates the sentiments of the people using twitter messages during early period of the second wave. Two-weeks data is manually annotated and several machine learning models were built.
- Categories:
1343 Views