Jackal robot 7-class terrain dataset, vision and proprioception sensors
- Citation Author(s):
-
Yu Chen
 (UIUC)
(UIUC)
- Submitted by:
- Yu Chen
- Last updated:
- DOI:
- 10.21227/d4eq-t458
- Data Format:
- Links:
 1301 views
1301 views
- Categories:
- Keywords:
Abstract
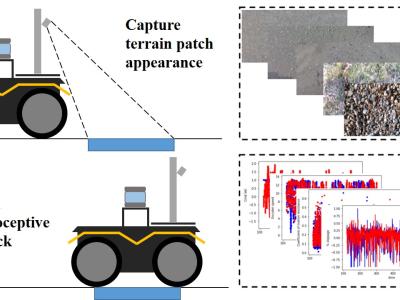
The Jackal UGV, from Clearpath Robotics, was used as the data collecting platform. This skid-steer four-wheel-drive vehicle comes with an onboard IMU, two DC motors with encoders that measure wheel angular speeds, and current sensors that measure motor current outputs. On each side of the robot, the front wheel and back wheel are jointed with a gearbox and so spin together at the same rate and direction. The IMU provided vehicle attitude measurements in terms of Euler angles, as well as linear acceleration and angular rate of the vehicle body in three Euclidean axes. Camera systems such as the RS D435i and RS T265 were mounted to an aluminium frame attached to the top of the robot platform. While the tracking camera T265, faced forward, the D435i depth camera was positioned and tilted in a way that the camera had a clear visual of the terrain patch. The patch size was ~"680 mm × 340 mm" with a look ahead distance of 150 mm relative to the chassis of the vehicle. The D435i served as a regular RGB camera for this study and the depth images reconstructed by the D435i were not included in any of the data sets. The T265 camera was used as a Visual-Inertia Odometry (VIO) solution that provided ego-motion estimations of the vehicle.
Six different sensor sources were recorded: 1) current feedback, 2) wheel encoder readings from each side of the vehicle, 3) 6 DoF VIO measurements from the T265, 4) three-axis linear acceleration, 5) attitude measurement from the IMU, and 6) RGB images taken by the D435i. In addition to the RGB images, all other sensor signals were used as proprioceptive features. Seven terrain classes were investigated, including asphalt, brick road, grass, gravel, pavement, sand, and coated floors.
For further detail, please refer to our manuscript: https://ieeexplore.ieee.org/document/9507312
Instructions:
Each HDF5 file contains four types of data entries: timestamps, signals, images, and labels. A .ipynb code example is included to demonstrate how to retrieve and format data appropriately.
The .ipynb script requires h5py, numpy, and matplotlib libraries.
** If you plan to load the entire dataset into your memory, make sure your PC has >16 Gb RAM
Dataset Files
- trainSet_c7_corrected.hdf5 (Size: 7.65 GB)
- validSet_c7_corrected.hdf5 (Size: 1.91 GB)
- trainSet_c7_raw.hdf5 (Size: 7.66 GB)
- validSet_c7_raw.hdf5 (Size: 1.91 GB)
- darkSet_c7_ver_2.hdf5 (Size: 2.24 GB)
- testSet_c7_ver_2.hdf5 (Size: 2.3 GB)
- sim_fog_ver_2.hdf5 (Size: 2.3 GB)
- sim_sun_ver_2.hdf5 (Size: 2.3 GB)
- Download this zip file and find the code example inside (Size: 123.16 KB)






