Navigation

This dataset investigates the effectiveness of various path planning algorithms in urban contexts using real-world traffic networks obtained from OpenStreetMap (OSM) at three different locations: Chongqing, China, Hubei Province, China, and Washington, D.C., USA. OSM data contains complex details of the road network, including road types, traffic restrictions, and geographic features. By employing zoning and hierarchical shrinkage strategies, we analyzed the route efficiency and travel time optimization of these different urban landscapes.
- Categories:
 284 Views
284 Views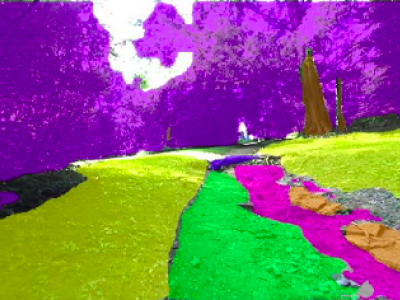
This work presents a specialized dataset designed to advance autonomous navigation in hiking trail and off-road natural environments. The dataset comprises over 1,250 images (640x360 pixels) captured using a camera mounted on a tele-operated robot on hiking trails. Images are manually labeled into eight terrain classes: grass, rock, trail, root, structure, tree trunk, vegetation, and rough trail. The dataset is provided in its original form without augmentations or resizing, allowing end-users flexibility in preprocessing.
- Categories:
599 Views
Mechanical Scanning Sonars (MSS) are popular underwater sensors for Unmanned Underwater Vehicles (UUV) due to their low cost, small size, and low power consumption. But due to their simplicity, there are also many research challenges related to their usage. Unfortunately, there is also a lack of data with ground truth UUV localization. We provide MSS datasets using a UUV with standard navigation sensors, i.e., an Inertial Measurement Unit (IMU) and a Doppler Velocity Log (DVL).
- Categories:
478 Views
We design a solution to achieve coordinated localization between two unmanned aerial vehicles (UAVs) using radio and camera perception. We achieve the localization between the UAVs in the context of solving the problem of UAV Global Positioning System (GPS) failure or its unavailability. Our approach allows one UAV with a functional GPS unit to coordinate the localization of another UAV with a compromised or missing GPS system. Our solution for localization uses a sensor fusion and coordinated wireless communication approach.
- Categories:
498 Views
This dataset is in support of my Research paper 'Design of 6-DoF Combat Quadcopter'.
Preprint:
The system is basic, on existing designs.It is very simple for any graduate,degree holder.
Related Claim : Novel ß Non-Linear Theory
- Categories:
1258 Views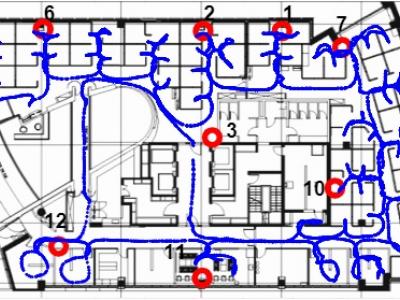
Dataset used for "A Machine Learning Approach for Wi-Fi RTT Ranging" paper (ION ITM 2019). The dataset includes almost 30,000 Wi-Fi RTT (FTM) raw channel measurements from real-life client and access points, from an office environment. This data can be used for Time of Arrival (ToA), ranging, positioning, navigation and other types of research in Wi-Fi indoor location. The zip file includes a README file, a CSV file with the dataset and several Matlab functions to help the user plot the data and demonstrate how to estimate the range.
- Categories:
3405 Views
Data (Non-Gaussian Noises and Measurement Information Loss)
- Categories:
174 Views
The odometric model is simulated herein. We described the trajectory of such one odometric model, with the delta of the heading angle given as one parameter of the simulation. The iterations show that the trajectory is well in the continuity of the variations of the heading angle. Moreover the distance in X and in Y are shown for the vehicle to be driven in the trajectory of the odometric model. Moreover I have displayed the linear approximation then. This is a tiny approximation made based upon the equations of the odometric model.
- Categories:
269 Views