*.txt; *.zip
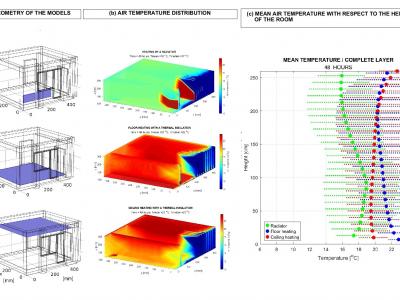
Numerical simulations are used to assess the efficiency of floor heating, ceiling heating, and plane radiator heating in a selected family house room under winter conditions in the Central European climate zone. COMSOL Multiphysics software was used for computer simulations. The output data were subsequently processed and analyzed using MATLAB software. Results indicate that floor and ceiling heating systems achieve higher and more rapid temperature increases compared to plane radiators.
- Categories:
 164 Views
164 Views
To address the challenges faced by patients with neurodegenerative disorders, Brain-Computer Interface (BCI) solutions are being developed. However, many current datasets lack inclusion of languages spoken by patients, such as Telugu, which is spoken by over 90 million people in India. To bridge this gap, we have created a dataset comprising Electroencephalograph (EEG) signal samples of commonly used Telugu words. Using the Open-BCI Cyton device, EEG samples were captured from volunteers as they pronounced these words.
- Categories:
470 Views
Accurate detection and segmentation of apple trees are crucial in high throughput phenotyping, further guiding apple trees yield or quality management. A LiDAR and a camera were attached to the UAV to acquire RGB information and coordinate information of a whole orchard. The information was integrated by simultaneous localization and mapping network to form a dataset of RGB-colored point clouds. The dataset can be used for methods related to apple detection and segmentation based on point clouds.
- Categories:
788 Views
This dataset is object tracking data for MOT challenge datasets.
The inferenced data is generated by Yolov5 and DeepSort.
- Categories:
26 Views
The dataset includes active power measurements for a residential dwelling (apartment) located in Bucharest, Romania, collected at 1s second reporting rate over several months.
Always-on appliances include the refrigerator and the wireless router. Several other appliances are installed in the residential unit: washing machine, lighting fixtures, electrical iron, vacuum cleaner, various ICT charging devices, and air conditioning (seldom used).
- Categories:
1435 Views
Ground Penetrating Radar (GPR) has a wide range of applications such as detection of buried mines, pipes and wires. GPR has been used as a near-surface remote sensing technique, and its working principle is based on electromagnetic (EM) wave theory. Here proposed data set is meant for data driven surrogate modelling based Buried Object Characterization. The considered problem of estimating geophysical parameters of a buried object is 2D. The training and testing scenarios include B-scan images (2D data), which contain 16 pairs of A-scan (concatenated forms of A-scans).
- Categories:
880 Views
“DCA-IoMT Dataset” belongs to the research article entitled “DCA-IoMT: Knowledge Graph Embedding-enhanced Deep Collaborative Alerts-recommendation against COVID19 (DOI: 10.1109/TII.2022.3159710)” accepted for publication in the Journal of IEEE Transactions on Industrial Informatics.
- Categories:
1496 Views
The dataset contains the path loss measurements obtained with a LoRa (868 MHz) transmitting radio and five receivers. The receivers move in a search area covering both outdoor and indoor areas wherein a double-slope path loss is experienced. The data can be used to test range-based localization algorithm through the received signal strength.
- Categories:
500 Views