unmanned aerial vehicles (UAVs)

Experimental measurement data was obtained utilizing RCbenchmark 1780 with full-range PWM signals. Measurements were made for two series of setups.
First series is related to low-voltage setups using the following T-MOTOR components: - motors: MN4014 400Kv, MN5212 340Kv, MN501-S 360Kv, U7 280Kv, MN6007 320Kv, P60 340Kv, MN701-S 280Kv; - ESC: Air 40A, Flame 40A, Flame 70A, Alpha 60A, Flame 100A; - propellers: P17×5.8, P18×6.1, P20×6, P22×6.6, P24×7.2, G26×8.5; - battery: 6-cell (6S) Lithium polymer (LiPo).
- Categories:
 165 Views
165 Views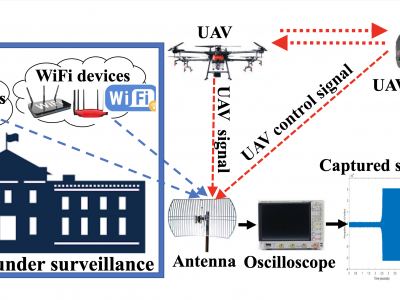
This article presents the details of the Cardinal RF (CardRF) dataset. CardRF is acquired to foster research in RF- based UAV detection and identification or RF fingerprinting. RF signals were collected from UAV controllers, UAV, Bluetooth, and Wi-Fi devices. Signals are collected at both visual line-of-sight and beyond-line-of-sight. The assumptions and procedure for the data acquisition are presented. A detailed explanation of how the data can be utilized is discussed. CardRF is over 65 GB in storage memory.
- Categories:
10099 Views
The DroneDetect dataset consists of 7 different models of popular Unmanned Aerial Systems (UAS) including the new DJI Mavic 2 Air S, DJI Mavic Pro, DJI Mavic Pro 2, DJI Inspire 2, DJI Mavic Mini, DJI Phantom 4 and the Parrot Disco. Recordings were collected using a Nuand BladeRF SDR and using open source software GNURadio. There are 4 subsets of data included in this dataset, the UAS signals in the presence of Bluetooth interference, in the presence of Wi-Fi signals, in the presence of both and with no interference.
- Categories:
15730 Views
This dataset contains RF signals from drone remote controllers (RCs) of different makes and models. The RF signals transmitted by the drone RCs to communicate with the drones are intercepted and recorded by a passive RF surveillance system, which consists of a high-frequency oscilloscope, directional grid antenna, and low-noise power amplifier. The drones were idle during the data capture process. All the drone RCs transmit signals in the 2.4 GHz band. There are 17 drone RCs from eight different manufacturers and ~1000 RF signals per drone RC, each spanning a duration of 0.25 ms.
- Categories:
18950 Views