Digital signal processing
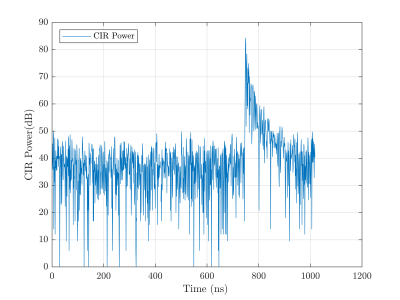
This dataset includes UWB range measurements performed with Pozyx devices. The measurements were collected between two tags placed at several distances and in two different conditions: with Line of Sight (LOS) and Non-Line of Sight (NLOS). The measurements include the range estimated by the Pozyx tag, the actual distance between devices, the timestamp of each measurement and the values corresponding to the samples of the Channel Impulse Response (CIR) after each transmission.
- Categories:
 2609 Views
2609 Views
This data was used for the paper: J. Wang, P. Aubry, and A. Yarovoy, " Three-Dimensional Short-Range Imaging With Irregular MIMO Arrays Using NUFFT-Based Range Migration Algorithm", IEEE Transactions on Geoscience and Remote Sensing. It includes two synthetic electromagnetic datasets and one experimental measured data with multiple-input-multiple-output (MIMO) arrays.
- Categories:
387 Views
Time Scale Modification (TSM) is a well-researched field; however, no effective objective measure of quality exists. This paper details the creation, subjective evaluation, and analysis of a dataset for use in the development of an objective measure of quality for TSM. Comprised of two parts, the training component contains 88 source files processed using six TSM methods at 10 time scales, while the testing component contains 20 source files processed using three additional methods at four time scales.
- Categories:
682 Views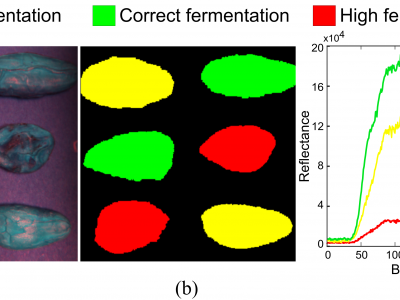
The target scene consists of a black card with six cocoa beans of three different fermentation levels (High, correct, and low fermentation), two beans for each class, whose false-color composite is shown in the provided Figure (a), ground-truth map is shown in Fig. (b), and Fig. (c) presents its representative spectral signatures. The spectral image was acquired by the AVT Stingray F-080B camera by acquiring one band each time from 350 - 950 nm. The acquired image has a spatial resolution of 1096x712 pixels and 300 spectral bands of 2 nm width.
- Categories:
821 Views

Wide varieties of scripts are used in writing languages throughout the world. In a multiscript and multi-language environment, it is necessary to know the different scripts used in every part of a document to apply the appropriate document analysis algorithm. Consequently, several approaches for automatic script identification have been proposed in the literature, and can be broadly classified under two categories of techniques: those that are structure and visual appearance-based and those that are deep learning-based.
- Categories:
693 Views
This dataset was developed at the School of Electrical and Computer Engineering (ECE) at the Georgia Institute of Technology as part of the ongoing activities at the Center for Energy and Geo-Processing (CeGP) at Georgia Tech and KFUPM. LANDMASS stands for “LArge North-Sea Dataset of Migrated Aggregated Seismic Structures”. This dataset was extracted from the North Sea F3 block under the Creative Commons license (CC BY-SA 3.0).
- Categories:
597 Views
Cluster analysis, which focuses on the grouping and categorization of similar elements, is widely used in various fields of research. Inspired by the phenomenon of atomic fission, this paper proposes a novel density-based clustering algorithm, called fission clustering (FC). It focuses on mining the dense families of clusters in the dataset and utilizes the information of the distance matrix to fissure the dataset into subsets.
- Categories:
305 Views
Modern technologies have made the capture and sharing of digital video commonplace; the combination of modern smartphones, cloud storage, and social media platforms have enabled video to become a primary source of information for many people and institutions. As a result, it is important to be able to verify the authenticity and source of this information, including identifying the source camera model that captured it. While a variety of forensic techniques have been developed for digital images, less research has been conducted towards the forensic analysis of videos.
- Categories:
1231 Views
This dataset provides digital images and videos of surface ice conditions were collected from two Alberta rivers - North Saskatchewan River and Peace River - in the 2016-2017 winter seasons.
Images from North Saskatchewan River were collected using both Reconyx PC800 Hyperfire Professional game cameras mounted on two bridges in Edmonton as well as a Blade Chroma UAV equipped with a CGO3 4K camera at the Genesee boat launch.
Data for the Peace River was collected using only the UAV at the Dunvegan Bridge boat launch and Shaftesbury Ferry crossing.
- Categories:
1464 Views