Pozyx CIR and range with LOS and NLOS
- Citation Author(s):
-
Valentín Barral
 (University of A Coruña)
(University of A Coruña)
- Submitted by:
- Valentin Barral
- Last updated:
- DOI:
- 10.21227/sr92-6s06
- Data Format:
 2633 views
2633 views
- Categories:
- Keywords:
Abstract
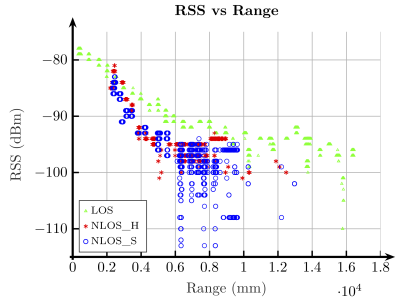
This dataset includes UWB range measurements performed with Pozyx devices. The measurements were collected between two tags placed at several distances and in two different conditions: with Line of Sight (LOS) and Non-Line of Sight (NLOS). The measurements include the range estimated by the Pozyx tag, the actual distance between devices, the timestamp of each measurement and the values corresponding to the samples of the Channel Impulse Response (CIR) after each transmission.
Instructions:
Dataset contains two zip files. One contains the raw rosbag records and the second one includes two matlab files (one for the LOS scenario, other for the NLOS) that include the final data once the actual distance is added and the CIR measurements are processed.
Rosbag files contain messages of type PozyxRangingWithCir. This type of message can be found in the next repository: https://github.com/valentinbarral/rosmsgs
Each of the matlab files contains an array of structs. Each struct has these fields:
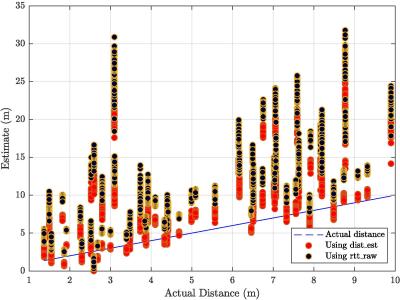
- range: Pozyx estimation of distance.
- distance: Current distance between devices.
- rss: Estimation of received power.
- seq: A ranging sequence number, between 0 and 255.
- timestamp: Timestamp of the measure.
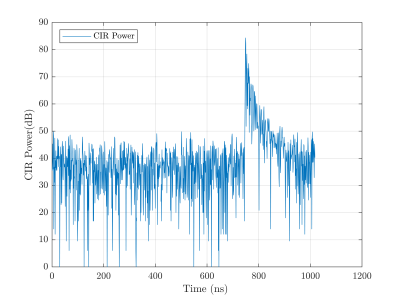
- cirPower: CIR power calculated using this formula: 10*log10(abs(cirRealPart.^2)).
- cir: Samples of the CIR. 1016 complex values.






In reply to 123 by zhang jian