Artificial Intelligence

We introduce a dataset comprised of energy consumption data from smart meters in French households, capturing detailed, disaggregated time series for various home appliances. This dataset covers a six-month period with a one-minute sampling rate across five different households. The objective of this dataset is to support the development of models that learn disentangled representations of time series energy data, which can significantly enhance model generalization across both in-distribution and out-of-distribution scenarios.
- Categories:
 175 Views
175 Views
This dataset contains audio recordings sourced from more than 57 TV shows provided by the Saudi Broadcasting Authority. The total number of hours published for these recordings is ~667 hours. The recordings are in Arabic, the majority are in Saudi dialects, and some are in other dialects. To enhance the usage of SADA, the dataset is split into training, validation, and testing sets. Each of validation and testing sets is around 10 hours in audio segments length while training set is 418 hours.
- Categories:
108 Views
we construct the fine-grained landmark dataset for real urban street scenes. and utilize this dataset for fine-tuning. Specifically, based on the GSV dataset\cite{Ali_bey_2022} from Google Street View, we obtain image data with landmark bounding boxes by having annotators outline common landmarks in the urban street view images, while also recording the types of landmarks.
- Categories:
24 Views
One of the leading causes of early health detriment is the increasing levels of air pollution in major cities and eventually in indoor spaces. Monitoring the air quality effectively in closed spaces like educational institutes and hospitals can improve both the health and the life quality of the occupants. In this paper, we propose an efficient Indoor Air Quality (IAQ) monitoring and management system, which uses a combination of cutting-edge technologies to monitor and predict major air pollutants like CO2, PM2.5, TVOCs, and other factors like temperature and humidity.
- Categories:
373 Views
This upload contains code related to the article and is intended to help IEEE DataPort users understand how to use and reproduce our research methods. The code implements Remote Sensing image change Detection Network (CGLCS-Net) based on deep learning, including global-local context-aware selector (GLCAS) and subspace Self-Attention Fusion module (SSAF).
- Categories:
75 Views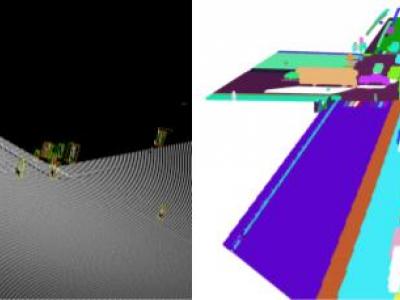
This paper is released with our paper titled “Annotated 3D Point Cloud Dataset for Traffic Management in Simulated Urban Intersections”. This paper proposed a 3D simulation based approach for generating an elevated LiDAR based 3D point cloud dataset simulating traffic in road intersections using Blender. We generated randomized and controlled traffic scenarios of vehicles and pedestrians movement around and within the intersection area, representing various scenarios. The dataset has been annotated to support 3D object detection and instance segmentation tasks.
- Categories:
110 Views
In this work, we study urban dynamics at the census tract level.
Information on census tracts and their corresponding geographic boundaries is available through the US Census Bureau survey. Each predetermined census tract is treated as a region. We use the GPS coordinates to compute the distance between two region nodes.
- Categories:
30 Views
Dataset for PerfCam: Digital Twinning for Production Lines Using 3D Gaussian Splatting and Vision Models
KTH Royal Institute of Technology, SCI; AstraZeneca, Sweden Operations
- Categories:
317 Views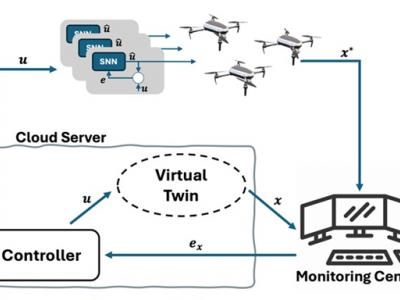
Presented study introduces a novel distributed cloud-edge framework for autonomous multi-UAV systems that combines the computational efficiency of neuromorphic computing with nature-inspired control strategies. The proposed architecture equips each UAV with an individual Spiking Neural Network (SNN) that learns to reproduce optimal control signals generated by a cloud-based controller, enabling robust operation even during communication interruptions.
- Categories:
196 Views
A new small aerial flame dataset, called the Aerial Fire and Smoke Essential (AFSE) dataset, is created which is comprised of screenshots from different YouTube wildfire videos as well as images from FLAME2. Two object categories are included in this dataset: smoke and fire. The collection of images is made to mostly contain pictures utilizing aerial viewpoints. It contains a total of 282 images with no augmentations and has a combination of images with only smoke, fire and smoke, and no fire nor smoke.
- Categories:
769 Views