Road-Intersec-Traffic
- Citation Author(s):
-
Elham Binshaflout
 (King Abdullah University of Science and Technology (KAUST), Imam Abdulrahman bin Faisal University)
Chaima Zaghouani (King Abdullah University of Science and Technology (KAUST))Nawfal Guefrachi (Missouri University of Science & Technology, MO, USA)Charalampos Antoniadis (King Abdullah University of Science and Technology (KAUST))Hakim Ghazzai (King Abdullah University of Science and Technology (KAUST))Ahmad Alsharoa (Missouri University of Science & Technology, MO, USA)Gianluca Setti (King Abdullah University of Science and Technology (KAUST))
(King Abdullah University of Science and Technology (KAUST), Imam Abdulrahman bin Faisal University)
Chaima Zaghouani (King Abdullah University of Science and Technology (KAUST))Nawfal Guefrachi (Missouri University of Science & Technology, MO, USA)Charalampos Antoniadis (King Abdullah University of Science and Technology (KAUST))Hakim Ghazzai (King Abdullah University of Science and Technology (KAUST))Ahmad Alsharoa (Missouri University of Science & Technology, MO, USA)Gianluca Setti (King Abdullah University of Science and Technology (KAUST)) - Submitted by:
- Elham Binshaflout
- Last updated:
- DOI:
- 10.21227/vm2m-ar04
 142 views
142 views
- Categories:
- Keywords:
Abstract
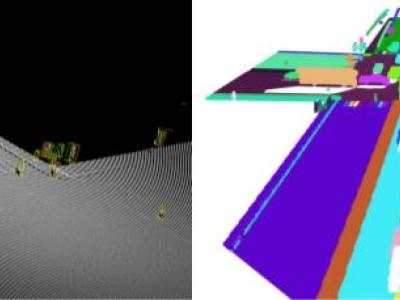
This paper is released with our paper titled “Annotated 3D Point Cloud Dataset for Traffic Management in Simulated Urban Intersections”. This paper proposed a 3D simulation based approach for generating an elevated LiDAR based 3D point cloud dataset simulating traffic in road intersections using Blender. We generated randomized and controlled traffic scenarios of vehicles and pedestrians movement around and within the intersection area, representing various scenarios. The dataset has been annotated to support 3D object detection and instance segmentation tasks.
For a detailed description of the dataset, please refer to our accompanying paper, titled "Annotated 3D Point Cloud Dataset for Traffic Management in Simulated Urban Intersections". If you find this dataset useful for your research, please consider citing the paper to acknowledge our work. The citation format is provided below for your convenience:
E. Binshaflout, C. Zaghouani, N. Guefrachi, C. Antoniadis, H. Ghazzai, A. Alsharoa, and G. Setti, "Annotated 3D Point Cloud Dataset for Traffic Management in Simulated Urban Intersections", IEEE International Symposium on Circuits and Systems (IEEE ISCAS), London, UK, May 2025.
The dataset is validated with object detection and segmentation models in the paper:
E. Binshaflout, C. Zaghouani, N. Guefrachi, C. Antoniadis, H. Ghazzai, A. Alsharoa, S. Najeh, and G. Setti, "AI-driven Traffic Scene Understanding Using Static LiDAR Sensors", IEEE International Conference on Artificial Intelligence Circuits and Systems (AICAS), Bordeaux, France, Apr. 2025.Instructions:
The dataset consists of raw data collected from different animated traffic scenarios in Blender software.
RoadIntersec_V1:
This dataset consists of 201 animated road intersection scenario, each scenario is recorded in separated folder. The dataset is structured as follows:
Scenario folder (animxx) ==> Animation frames collected by different simulated LiDAR sensors stored in CSV format.
Each CSV file contains the result of scanned and collected point cloud data for each object, along with the object detection and instance segmentation labeling data.
Since this is row data, a preprocessing step is definitely needed before training deep learning models of any of these tasks.
The length of scenarios varies, depending on the scenario settings, to focus on localizing and detecting moving objects.
Note: The size of this dataset is around 45 GB, so it is expected to take some time to download and requires enough space in the device used.






