Machine Learning

Holoscopic micro-gesture recognition (HoMG) database was recorded using a holoscopic 3D camera, which have 3 conventional gestures from 40 participants under different settings and conditions. The principle of holoscopic 3D (H3D) imaging mimics fly’s eye technique that captures a true 3D optical model of the scene using a microlens array. For the purpose of H3D micro-gesture recognition. HoMG database has two subsets. The video subset has 960 videos and the image subset has 30635 images, while both have three type of microgestures (classes).
- Categories:
 580 Views
580 Views
One paramount challenge in multi-ion-sensing arises from ion interference that degrades the accuracy of sensor calibration. Machine learning models are here proposed to optimize such multivariate calibration. However, the acquisition of big experimental data is time and resource consuming in practice, necessitating new paradigms and efficient models for these data-limited frameworks. Therefore, a novel approach is presented in this work, where a multi-ion-sensing emulator is designed to explain the response of an ion-sensing array in a mixed-ion environment.
- Categories:
150 Views

The ability of detecting human postures is particularly important in several fields like ambient intelligence, surveillance, elderly care, and human-machine interaction. Most of the earlier works in this area are based on computer vision. However, mostly these works are limited in providing real time solution for the detection activities. Therefore, we are currently working toward the Internet of Things (IoT) based solution for the human posture recognition.
- Categories:
4042 Views
DataSet used in learning process of the traditional technique's operation, considering different devices and scenarios, the proposed approach can adapt its response to the device in use, identifying the MAC layer protocol, perform the commutation through the protocol in use, and make the device to operate with the best possible configuration.
- Categories:
584 Views
Vehicular networks have various characteristics that can be helpful in their inter-relations identifications. Considering that two vehicles are moving at a certain speed and distance, it is important to know about their communication capability. The vehicles can communicate within their communication range. However, given previous data of a road segment, our dataset can identify the compatibility time between two selected vehicles. The compatibility time is defined as the time two vehicles will be within the communication range of each other.
- Categories:
829 Views
Recognition and classification of currency is one of the important task. It is a very crucial task for visually impaired people. It helps them while doing day to day financial transactions with shopkeepers while traveling, exchanging money at banks, hospitals, etc. The main objectives to create this dataset were:
1) Create a dataset of old and new Indian currency.
2) Create a dataset of Thai Currency.
3) Dataset consists of high-quality images.
- Categories:
4007 Views
INDIA is the second-largest fruit and vegetable exporter in the world after China. It ranked first in the production of Bananas, Papayas, and Mangoes. Public datasets of fruits are available but they are limited to general fruit classes and failed to classify the fruits according to the fruit quality. To overcome this problem, we have created a dataset named FruitsGB (Fruits Good/Bad) dataset.
- Categories:
6805 Views
Message Queuing Telemetry Transport (MQTT) protocol is one of the most used standards used in Internet of Things (IoT) machine to machine communication. The increase in the number of available IoT devices and used protocols reinforce the need for new and robust Intrusion Detection Systems (IDS). However, building IoT IDS requires the availability of datasets to process, train and evaluate these models. The dataset presented in this paper is the first to simulate an MQTT-based network. The dataset is generated using a simulated MQTT network architecture.
- Categories:
24965 Views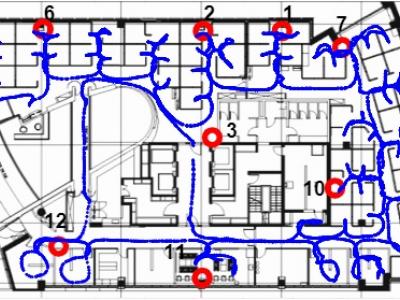
Dataset used for "A Machine Learning Approach for Wi-Fi RTT Ranging" paper (ION ITM 2019). The dataset includes almost 30,000 Wi-Fi RTT (FTM) raw channel measurements from real-life client and access points, from an office environment. This data can be used for Time of Arrival (ToA), ranging, positioning, navigation and other types of research in Wi-Fi indoor location. The zip file includes a README file, a CSV file with the dataset and several Matlab functions to help the user plot the data and demonstrate how to estimate the range.
- Categories:
3430 Views