mp4
This dataset comprises images of parts from real industrial scenarios and virtual reality environments. Real images are sourced from actual industrial settings, ensuring both authenticity and diversity, while virtual reality images, which make up approximately 11% of the dataset, are captured through precise 3D modeling. Approximately 30% of the part information was manually authored by industry experts, while the remaining 70% was generated by multimodal large models such as Wenxin Yiyan and GPT-4.
- Categories:
 205 Views
205 Views
A flexible pressure sensing system built with a flexible pressure sensor collected footprint image video of mice in a dark environment and open field, including footprint data of Parkinson's mice and normal mice at 6 months and 9 months old. Among them, 804, 811, 812 and 825 were normal mice; Mice 1, 2, 3, 4, 653, 682 were normal mice, and the rest were PD mice.
- Categories:
73 Views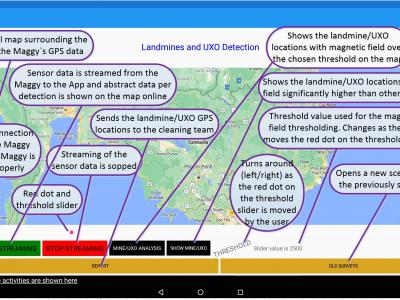
In this research, a small-scale drone with the required magnetometer sensor technologies and novel intelligent automated techniques -- Maggy, was built to automate and ease the procedures of cleaning landmines and UXO/IDE. The dataset with an MP4-formated video demonstrates how a magnetometer-integrated autonomous drone can map the magnetic field of a landmine region effectively and efficiently using an intelligent application through near real-time data streaming.
- Categories:
228 Views

Due to the rapid mobility and superior obstacle surmounting capabilities, quadruped robots are increasingly employed in industrial inspections. Quadruped robots usually utilize laser simultaneous localization and mapping (SLAM) for autonomous navigation. However, SLAM is susceptible to inaccuracies under the rapid movement and rotation of quadruped robots.
- Categories:
101 Views
Nasal cytology is a medicine field that focuses on the examination of nasal mucosa cells with the objective of recognizing changes in the epithelium, which is frequently subjected to acute or chronic irritation and inflammation caused by viruses, bacteria, or fungi; in the last decade, nasal cytology is becoming increasingly critical in diagnosing nasal conditions.
- Categories:
280 Views
Grasp intention recognition is a vital problem for controlling assistive robots to help the elderly and infirm people restore arm and hand function. This dataset contains gaze data and scene image data of healthy individuals and hemiplegic patients while performing different grasping tasks. It can be used for gaze-based grasp intention recognition studies.
- Categories:
200 Views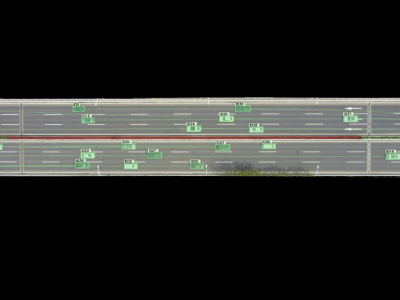

The extraction and construction of high-precision and long-distance vehicle trajectory data and microscopic traffic flow characteristics are critical for traffic safety studies. Current research typically relies on a limited number of datasets which suffer from vehicle detection inaccuracy and limitation of the coverage area. Therefore, we establish a high-precision and long-distance vehicle trajectory dataset of urban scenarios, which is also named as WUT-NGSIM.
- Categories:
1732 Views
A conventional virtual flight test generally refers to a 3-DOF dynamic flight test in a wind tunnel. In the wind tunnel test, the model aircraft is connected to the strut through a 3-DOF rotation mechanism and installed in the wind tunnel test section so that the model displacement is constrained but has 3 degrees of angular motion freedom. Open-loop and closed-loop control of the aircraft model is achieved by directly driving the rudder surface or by using commands from the flight control system.
- Categories:
241 Views