HDF5
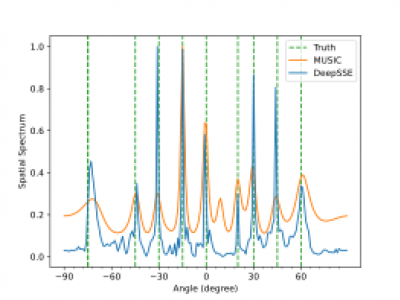
Dataset for multiple signal DOA estmation. This the original dataset used in our research. we consider a ULA with M = 16 antenna elements spaced at half-wavelength distance (l = λ/2). We consider narrowband, non-coherent signals with different intermediate frequencies (IF) transmitted from different sources. The signals are sampled at the intermediate frequency with a sampling frequency of 2.5MHz and 300 sample points. Then we simulate the array received signal according to signal model (1) at different SNRs of {-10, -9, -8, -7, -6, -5, -4, -3, -2, -1, 0, 1, 2, 3, 4, 5} dB.
- Categories:
 134 Views
134 Views
Sample dataset of a freehand 3D ultrafast Doppler scan acquired during brain tumor resection surgery. The dataset includes the beamformed ultrasound images, as well as the simultaneously acquired optical tracking data, describing the position of the ultrasound probe in space.
- Categories:
51 Views
The present numerical work combines gain switching and external optical feedback to generate pulses with a high level of coherence across a large array of semiconductor lasers. The influence of several parameters such as modulation frequency, feedback strength and frequency detuning is analyzed and this dataset gathers the temporal traces generated with our code, that is adapted from the Lang-Kobayashi model to take into account decayed coupling in an array of lasers.
- Categories:
101 Views
In our ever-expanding world of advanced satellite and communications systems, there's a growing challenge for passive radiometer sensors used in the Earth observation like 5G. These passive sensors are challenged by risks from radio frequency interference (RFI) caused by anthropogenic signals. To address this, we urgently need effective methods to quantify the impacts of 5G on Earth observing radiometers. Unfortunately, the lack of substantial datasets in the radio frequency (RF) domain, especially for active/passive coexistence, hinders progress.
- Categories:
595 Views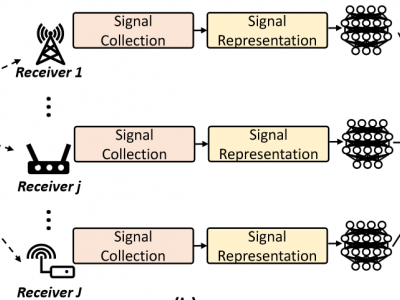
Radio frequency fingerprint identification (RFFI) is an emerging device authentication technique, which exploits the hardware characteristics of the RF front-end as device identifiers. The receiver hardware impairments interfere with the feature extraction of transmitter impairments, but their effect and mitigation have not been comprehensively studied. In this paper, we propose a receiver-agnostic RFFI system by employing adversarial training to learn the receiver-independent features.
- Categories:
777 Views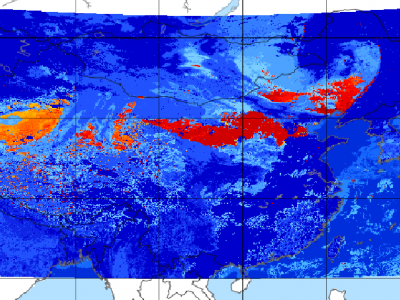
Since meteorological satellites can observe the Earth’s atmosphere from a spatial perspective at a large scale, in this paper, a dust storm database is constructed using multi-channel and dust label data from the Fengyun-4A (FY-4A) geosynchronous orbiting satellite, namely, the Large-Scale Dust Storm database based on Satellite Images and Meteorological Reanalysis data (LSDSSIMR), with a temporal resolution of 15 minutes and a spatial resolution of 4 km from March to May of each year during 2020–2022.
- Categories:
871 Views
LSD4WSD: Learning SAR Dataset for Wet Snow Detection.
The dataset can be found at : https://zenodo.org/record/8111485
- Categories:
207 Views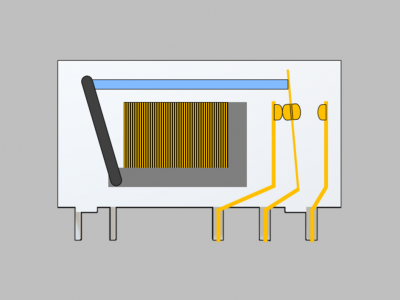
The Phoenix Contact Relay (PCR) dataset is provided for the development of algorithms for the analysis of lifetime data. It differs from previously published datasets in the number and complexity of measurements, as well as the scope of units tested and the practical relevance of the data. Thus, it provides an opportunity to develop and evaluate new concepts for predictive maintenance. The PCR data set presented includes the life data of 546 relays with a total of more than 106 million switching cycles, collected over a period of several years at a sampling rate of 10 kHz.
- Categories:
641 Views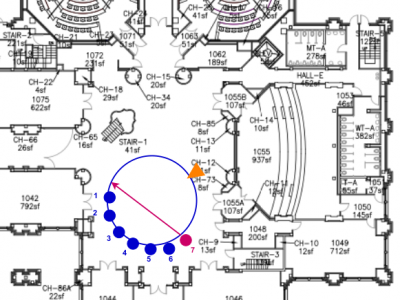
We conducted a massive MIMO channel measurement experiment in an indoor setting on the Rice University campus. We used a 64-antenna RENEW software-defined massive MIMO base station and seven software-defined clients in a large open area inside a building hall. We fixed six of the clients in a circle,15maway from the base station. The seventh node was placed on a robot where we moved the robot across the hall starting from the location of the first client to the last. We moved the robot along the path with different speeds, i.e. with0.5m/s,1m/s, and2m/s.
- Categories:
352 Views
Cosmological simulation dataset based on LBNL compressible cosmological hydrodynamics simulation code Nyx (https://ccse.lbl.gov/Research/NYX/). The Nyx simulation data are post-analysis data composed of 3D arrays in space (such as dark matter density, baryon density, temperature, and velocity).
- Categories:
462 Views