Excel

The data pertaining to a 12000 KW Grid-connected Solar Photo voltaic plant is added for use by reserachers.
- Categories:
 398 Views
398 Views
This dataset presents the measurement results for the evaluation study on the performance of an inductor-based and a switched capacitor-based energy harvesting boost converter PMICs by their charging efficiencies when connected to photovoltaic cells and Li-ion batteries under indoor lighting conditions.
- Categories:
162 Views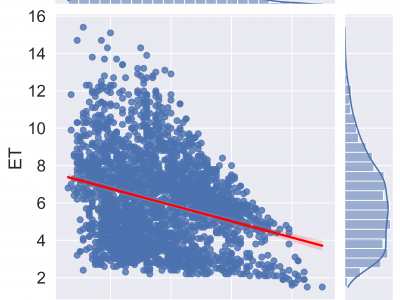
Reference Evapotranspiration (ETo) is the basic element of smart irrigation water management for sustainable developments in agriculture. Penman-Monteith (FAO-56 PM) is the standard method of ETo. The FAO-56 PM is complex in nature due to the requirements of many climatic conditions. Many existing machine learning-based solutions for simplification of ETo are limited to a specific area and not in accordance with the standard method FAO-56 PM.
- Categories:
189 Views
The dataset for the vehicles collusion detection in internet of vehicles is generated from internet of vehicles enviornment using VSSIM. The detail procedure of the data collection and the preprocessing procedure can be found in the publihsed paper - https://doi.org/10.1016/j.eswa.2022.119033.
- Categories:
606 Views
Electroretinography is a non-invasive electrophysiological method standardized by the International Society for Clinical Electrophysiology of Vision (ISCEV). Electroretinography has been used for the clinical application and standardization of electrophysiological protocols for diagnosing the retina since 1989. Electroretinography become fundamental ophthalmological research method that may assesses the state of the retina. To transfer clinical practice to patients the establishment of standardized protocols is an important step.
- Categories:
1050 Views
CONTENTS OF THIS FILE
* Data Analysis
* Experimental Design
# Data Analysis
This folder consists of data obtained from the experiments and the materials we use for analysis. Here we provide the following documents:
01-The folder "Class diagrams"
This folder contains class diagrams realized by participants in three experiments.
02-Code.R
- Categories:
257 Views
Port scanning attack is popular method to map a remote network or identify operating systems and applications. It allows the attackers to discover and exploit the vulnerabilities in the network.
- Categories:
1511 Views
This dataset consists of a simulated normal distribution data having n = 500 data points and mean = 80 and standard deviation = 2.
- Categories:
2197 Views
该数据是锂离子电池在不同温度下的实验数据。它主要包括15°C,25°C和35°C不同温度下的实验数据。25°C下的数据集包含来自开路电压实验、HPPC实验和BBDST实验的数据,这些数据是原始数据。在15°C和35°C下处理的数据集是处理的电流和电压数据。
- Categories:
826 ViewsTesting Australian standard consumers’ understanding of the language used to describe wine
- Categories:
139 Views