IoT
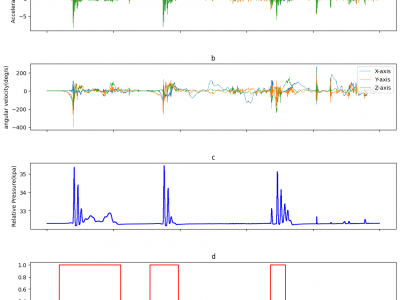
The data was collected by outfitting one of the players with the experimental balloon, which incorporated the embedded circuit and sensors. The sensors positioned at the top-right to the player within the bubble balloon, where a player stand inside. The sensors' data were collected at specific sampling frequencies (Accelerometer: 1000Hz, Gyroscope: 1000Hz, and Pressure: 40Hz). The experiment was conducted involving five different players. This approach allowed for the inclusion of diverse data samples, taking into account variations in player metrics, movements, and gameplay dynamics.
- Categories:
 175 Views
175 Views
The security of systems with limited resources is essential for deployment and cannot be compromised by other performance metrics such as throughput. Physically Unclonable Functions (PUFs) present a promising, cost-effective solution for various security applications, including IC counterfeiting and lightweight authentication. PUFs, as security blocks, exploit physical variations to extract intrinsic responses based on applied challenges, with Challenge-Response Pairs (CRPs) uniquely defining each device.
- Categories:
310 Views
- Categories:
365 Views
This dataset presents a comprehensive collection of the indoor temperature data collection procedure, meticulously designed to develop a robust dataset. The primary purpose of this dataset is to train a sophisticated machine learning algorithm capable of dynamically controlling the climate within indoor environments. The data is gathered in the A-block hostel room block on the 13th floor of VIT University Chennai, from April 15th to April 22nd, 2024.
- Categories:
415 Views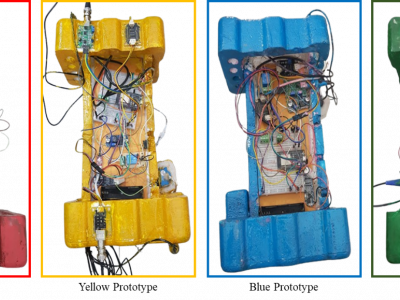
Bangladesh's aquaculture industry provides employment and food security. However, water quality management, disease control, and environmental monitoring continue to hinder aquaculture productivity and sustainability. This research uses IoT devices to create a comprehensive aqua fisheries dataset to solve these issues.The project uses IoT sensors and data collection methods to monitor water temperature, pH, dissolved oxygen, and turbidity in Bangladeshi aquaculture ponds.
- Categories:
336 Views
The dataset consists of 4-channeled EOG data recorded in two environments. First category of data were recorded from 21 poeple using driving simulator (1976 samples). The second category of data were recorded from 30 people in real-road conditions (390 samples).
All the signals were acquired with JINS MEME ES_R smart glasses equipped with 3-point EOG sensor. Sampling frequency is 200 Hz.
- Categories:
150 Views
<p>Mixed critical applications are real-time applications that have a combination of both high and low-critical tasks. Each task set has primary tasks and two backups of high-critical tasks. In the work carried out, different synthetic workloads and case studies are used for extracting the schedule and overhead data on a real-time operating system. The utilization of the task sets lies between 0.7 to 2.4.The Linux kernel is recompiled with Litmus-RT API to monitor the scheduling decisions and also measure the overheads incurred.
- Categories:
170 Views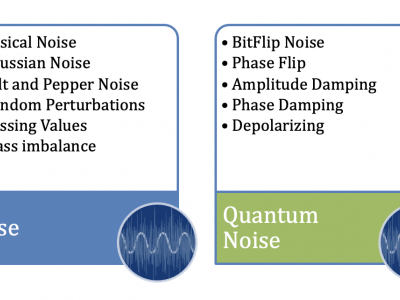
QuaN is a collection of specially designed datasets for exploring the impact of noise quantum machine learning and other applications. The presented work focuses on the transformation of clean datasets into noisy counterparts across diverse domains, including MNIST-handwritten digits datasets, Medical MNIST, IRIS datasets and Mobile Health datasets. The dataset is created using noise from classical and quantum domains.
- Categories:
449 Views
We investigated the long term functionality of the designed PMCS in a practical use case where we monitored plant growth of classical horticulture Dianthus flowers (Dianthus carthusianorum) under the effect of plastic mulching over a period of 4 months. This use case represents a common phenological monitoring case that can be used in agricultural studies. For this, we integrated our PMCS in an embedded vision camera equipped with the openMV H7 Plus board in a waterproof housing [26]. The system shown in Fig.
- Categories:
50 Views
These datasets are collected from the tests that were performed for decentralized synchronization among collaborative robots via 5G and Ethernet networks using with/without causal message ordering. These files have different names depending on the connection type and causality type. For example, 5G_with_causality.txt file stores the test results which were performed on a public 5G network using causal message ordering for different cobot groups like 5,10,20,30,40. The test results for each robot group are separated in each txt file.
- Categories:
6 Views