Climate Change/Environmental

This dataset, titled "Synthetic Sand Boil Dataset for Levee Monitoring: Generated Using DreamBooth Diffusion Models," provides a comprehensive collection of synthetic images designed to facilitate the study and development of semantic segmentation models for sand boil detection in levee systems. Sand boils, a critical factor in levee integrity, pose significant risks during floods, necessitating accurate and efficient monitoring solutions.
- Categories:
 342 Views
342 Views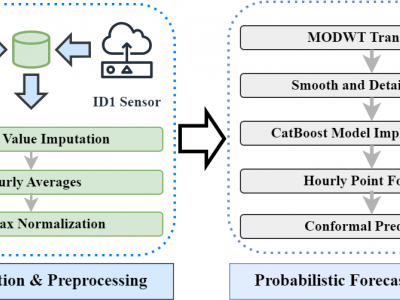
Data Collection Period: Both datasets cover the period from July 1, 2022, to July 31, 2023. This one-year span captures a full cycle of seasonal variations, which are critical for understanding and forecasting air quality trends.
Data Characteristics
- Temporal Resolution: The data is recorded at 15-minute intervals, offering detailed temporal resolution.
- Missing Data: Both datasets contain missing values due to sensor malfunctions or communication issues. These missing values were handled using imputation techniques as part of the preprocessing phase.
- Categories:
447 Views

AirIoT is a temporal dataset of air pollution concentration values measured for almost three years in Hyderabad, India. In AirIoT, a dense network of IoT-based PM monitoring devices equipped with low-cost sensors was deployed. The research focuses on two primary aspects: measurement and modelling. The team developed, calibrated, and deployed 50 IoT-based PM monitoring devices throughout Hyderabad, India, covering urban, semi-urban, and green areas.
- Categories:
1366 Views
We investigated the long term functionality of the designed PMCS in a practical use case where we monitored plant growth of classical horticulture Dianthus flowers (Dianthus carthusianorum) under the effect of plastic mulching over a period of 4 months. This use case represents a common phenological monitoring case that can be used in agricultural studies. For this, we integrated our PMCS in an embedded vision camera equipped with the openMV H7 Plus board in a waterproof housing [26]. The system shown in Fig.
- Categories:
75 Views
This repository provides replication materials for “Carbon majors and the scientific case for climate liability,” by Christopher Callahan and Justin Mankin.
- Categories:
578 Views
These datasets are gathered from an array of four gas sensors to be used for the odor detection and recognition system. The smell inspector Kit IX-16 used to create the dataset. each of 4 sensor has 16 channels of readings. Odors of different 12 samples are taken from these six sensors
1- Natural Air
2- Fresh Onion
3- Fresh Garlic
4- Black Lemon
5- Tomato
6- Petrol
7- Gasoline
8- Coffee
9- Orange
10- Colonia Perfume
- Categories:
470 Views
These datasets are gathered from an array of six gas sensors to be used for the odor recognition system. The sensors those used to create the data set are; Df-NH3, MQ-136, MQ-135, MQ-8, MQ-4, and MQ-2.
odors of different 10 samples are taken from these six sensors
1- Natural Air
2- Fresh Onion
3- Fresh Garlic
4- Fresh Lemon
5- Tomato
6- Petrol
7- Gasoline
8- Coffee 1,2
9- Orange
10- Colonia Perfume
- Categories:
757 Views
The paucity of data has long hindered the accurate modeling of CO2 concentrations within peatland regions, despite their significance as carbon reservoirs. Peatlands naturally sequester substantial carbon underground, yet disturbances, whether due to climate change or land use shifts, can trigger the release of significant amounts of carbon and other greenhouse gases, thereby disrupting the atmosphere and impacting human lives. The lack of comprehensive data has rendered it challenging to thoroughly assess the peatland regions' contribution to the net ecosystem carbon budget (NECB).
- Categories:
388 Views
This data repository comprises three distinct datasets tailored for different predictive modeling tasks. The first dataset is a synthetic dataset designed to simulate multivariate time series patterns, incorporating both linear and non-linear dependencies among input and target features. The second dataset, the Beijing Air Quality PM2.5 dataset, consists of PM2.5 measurements alongside meteorological data like temperature, humidity, and wind speed, with the objective of predicting PM2.5 concentrations.
- Categories:
409 Views