Computer Vision

The study of mouse social behaviours has been increasingly undertaken in neuroscience research. However, automated quantification of mouse behaviours from the videos of interacting mice is still a challenging problem, where object tracking plays a key role in locating mice in their living spaces. Artificial markers are often applied for multiple mice tracking, which are intrusive and consequently interfere with the movements of mice in a dynamic environment.
- Categories:
 204 Views
204 Views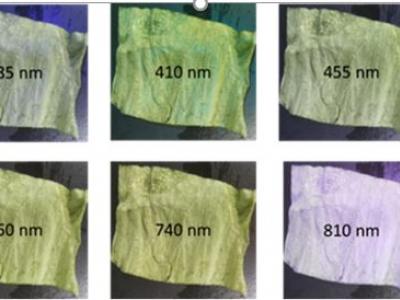
A custom made multispectral camera was used to collect a novel dataset of images of untreated lettuce leaves or leaves treated with vinegar, oil, or a combination of these. The camera captured image data at 10 wavelengths ∈[380nm,980nm] across the electromagnetic spectrum in the visible and NIR (near-infrared) regions. Imaging was done in a lab environment with the presence of ambient light.
- Categories:
470 Views
This dataset is a collection of images and their respective labels containing examples of multiple Brazilian coins, the primary purpose is to support the development of Computer Vision techniques for automatic detection of such objects, i.e., localization and classification tasks.
- Categories:
1445 Views
This dataset is used for arbitrary-orientation scene text detection, recognition and spotting.
- Categories:
224 Views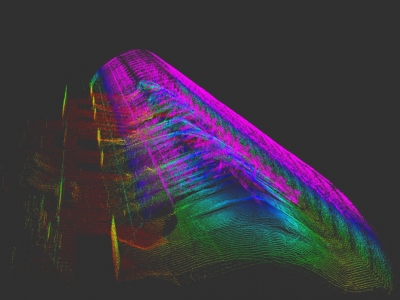
Dataset of rosbags collected during autonomous drone flight inside a warehouse of stockpiles. PCD files created using reconstruction method proposed by article.
Data still being move to IEEE-dataport.
- Categories:
1950 Views
About
Dataset described in:
Daudt, R.C., Le Saux, B., Boulch, A. and Gousseau, Y., 2019. Multitask learning for large-scale semantic change detection. Computer Vision and Image Understanding, 187, p.102783.
This dataset contains 291 coregistered image pairs of RGB aerial images from IGS's BD ORTHO database. Pixel-level change and land cover annotations are provided, generated by rasterizing Urban Atlas 2006, Urban Atlas 2012, and Urban Atlas Change 2006-2012 maps.
The dataset is split into five parts:
- 2006 images
- Categories:
19717 Views
Master data has played a significant role in improving operational efficiencies and has attracted the attention of many large businesses over the decade. Recent professional searches have also proved a significant growth in the practice and research of managing these master data assets.
- Categories:
556 Views
Pressing demand of workload along with social media interaction leads to diminished alertness during work hours. Researchers attempted to measure alertness level from various cues like EEG, EOG, Video-based eye movement analysis, etc. Among these, video-based eyelid and iris motion tracking gained much attention in recent years. However, most of these implementations are tested on video data of subjects without spectacles. These videos do not pose a challenge for eye detection and tracking.
- Categories:
845 Views
Four fully annotated marine image datasets. The annotations are given as train and test splits that can be used to evaluate machine learning methods.
- Categories:
551 Views
CUPSNBOTTLES is an object data set, recorded by a mobile service robot. There are 10 object classes, each with a varying number of samples. Additionally, there is a clutter class, containing samples where the object detector failed.
- Categories:
491 Views