*.csv; *.mat; *.m
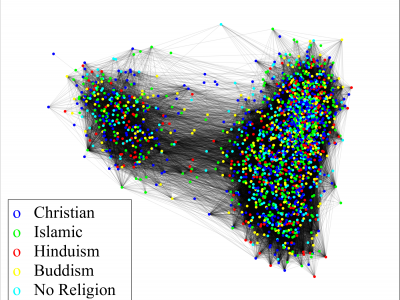
Simulation of the matrix-scaled consensus algorithm [1,2] on the network derived from the dataset socfb-Amherst41 [3,4].
References
[1] Trinh, M. H., Vu, D. V., Tran, Q. V., and Ahn, H.-S. "Matrix-scaled consensus." In Proc. of the 61st IEEE Conference on Decision and Control (CDC), pp. 346-351. IEEE, 2022. arXiv preprint arXiv:2204.10723 (2022)
[2] Trinh, M. H., Vu, H. H., Le-Phan, N.-M., and Nguyen, Q. N. "Matrix-Scaled Consensus over Undirected Networks." arXiv preprint arXiv:2303.14751 (2023).
- Categories:
 376 Views
376 Views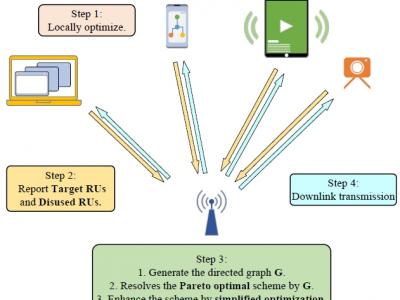
Distributed-Optimization with Centralized-Refining (DO-CR) mechanism to achieve more efficient resource allocation by engaging both access point and all devices. Specifically, the new DO-CR mechanism first utilizes the distributed processing capacity of all devices, allowing them to optimize their own resource allocation schemes through a new resource reservation and reporting technique. Then a centralized optimizer generates a graph of resource trading topology based on individual optimization results and achieves the Pareto optimal solution by the graph-based algorithm.
- Categories:
162 Views
The present contribution consists of two files. The first one (measurements_25GHz_11planes.mat) contains a series of measurements of the scattered electric field using two two-dimensional objects made of aluminum foil as targets. The dataset consists of S21 paramenter measurements, captured with a VNA at a frequency of 25 GHz. The field was sampled in 11 planes located at different distances from the plane containing the objects under test.
- Categories:
206 Views
This dataset captures the results of a simulation experiment on underwater collaborative navigation and formation control techniques for DSUA-IVV using DSUA sensors. The data includes the following: 1) the leader and follower's position, velocity amplitude, and motion direction in a fixed formation. 2) The leader and follower's location and amplitude of velocity during the formation transition process. 3) DSUA sensor sensitivity analysis data. Code files for processing and visualizing this data are also included in the dataset.
- Categories:
139 Views
This dataset includes balanced and unbalanced measurements from a 1.5 Hp asymmetrical six-phase induction machine that can be used for parameter estimation and dynamic modelling.
- Categories:
115 ViewsBistatic MIMO Radar Sensing
This dataset includes the synthetic aperture measurement data and code accompanying the publication "Bistatic MIMO Radar Sensing of Specularly Reflecting Surfaces for Wireless Power Transfer" [1].
Description:
- Categories:
493 Views
Scenarios 1, 3, and 4 are used for the stealthy attack situation, Scenarios 2, 5, 6, and 7 are used for the target-near-islands-and-reefs situation, and Scenario 8 is used for algorithms comparison.
- Categories:
125 Views
These data is state estimation accuracy of the proposed algorithm When the equivalent measurement loss probability is 0.1
These data includes the position estimation accuracy and velocity estimation accuracy of the algorithm.
The data are explained below:
save_bikf_pos_p1, save_kf_pos_p1, save_okf_pos_p1, save_bakf_pos_p1, save_vakf_pos_p1 are the position accuracy of the BKF, KF, OKF, the proposed BAKF-GIWM and the VAKF-GIWM, respectively.
- Categories:
85 Views
Here we provide fully sampled multi-dimensional datasets at different regions of interest for reproducibility validation of our submitted paper.
- Categories:
28 Views
Accurate conversion loss models are the keys to guaranteeing the more efficient operation of networked hybrid AC/DC microgrids (N-AC/DC-MGs). A two-stage stochastic unit commitment (UC) problem is proposed to improve the operational efficiency of N-AC/DC-MGs under uncertain renewable energy generation output and loads. The nonlinear power losses of AC/DC converters and DC/DC converters under different operating modes are formulated as novel multivariate nonlinear functions of both power and voltage.
- Categories:
163 Views