Sensor Fusion

The attachment "serial_data_dvl_20240729.txt" presents the DVL sensor data collected during the experiment in this paper, including information such as timestamps, transducer data, and velocity. The line beginning with "wru" indicates the status and information of the four transducers. The four data points following "wrx" represent, in sequence, the time interval since the last data collection (in milliseconds), x-axis velocity, y-axis velocity, and z-axis velocity. The four numbers following "wrt" represent the distances from the four transducers to the seabed.
- Categories:
 38 Views
38 Views
The data was collected by a tester holding a Xiaomi 13 smartphone while walking and collecting data in an underground parking lot covering a 16x70m area. The data includes 5G radio features and geomagnetic field information.
Collection Time: From 09:58 AM to 10:34 AM on July 13, 2024.
Total Samples: 12,800
Training Set (including validation set): 10,240
Test Set: 2,560
- Categories:
107 Views
The IAMCV Dataset was acquired as part of the FWF Austrian Science Fund-funded Interaction of Autonomous and Manually-Controlled Vehicles project. It is primarily centred on inter-vehicle interactions and captures a wide range of road scenes in different locations across Germany, including roundabouts, intersections, and highways. These locations were carefully selected to encompass various traffic scenarios, representative of both urban and rural environments.
- Categories:
524 Views
The signals of a recording belonging to the Frontside task are shown, the first two corresponding to the electromyography sensors while the others correspond to the infrared and red LED readings of the pulse oximetry sensor.
- Categories:
240 Views
Human arm motion data including forearm, upper-arm, and scapula link IMU modules beside SLAM reference position measurements compared to VICON as ground trouth.
- Categories:
412 Views
Data used for evaluation of the Chameleon system. We use it to evaluate capabilities of sensor fusion system that is able to adapot to multiple envrionemnts and monitor activity states within a room. The data set is divided by the two deployments and includes inforamtion for both of the sensors used to test the system. We include two weeks worth of data along with training and testing accuracy results.
- Categories:
1058 Views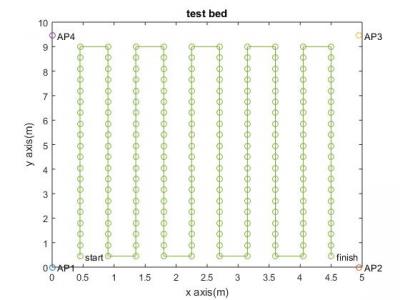
Data are collected on a 5m×10msized test bed, which is set up at Kadir Has University,Istanbul. Wireless access points are located around the corners of the testbed and markers are placed at every 45 cm. RSSI measurements done on the grid shown in Figure are stored via NetSurveyor program running on a Lenovo IdeapadFLEX 4 laptop, which has an Intel Dual Band Wireless-AC8260 Wi-Fi adaptor.At each measurement point, RSSI data are collected for1 min with a sampling interval of 250 ms.
- Categories:
941 Views