Machine Learning

This dataset was initially collected by Mrs Athira P K with the help of teachers and students of Rahmania school for handicapped, Kozhikode, Kerala, India. Later the dataset was extended by many other BTech and MTech students with the help of their friends.
MUDRA NITC dataset consists of videos of static and dynamic gestures of Indian sign language. In static gestures mainly static alphabets videos and preprocessed image frames are included.
- Categories:
 210 Views
210 Views
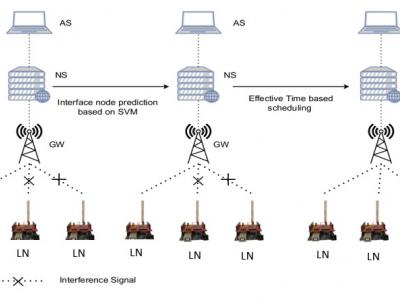
To illustrate the impact of the obstacles, we consider indoor and outdoor scenarios. We consider the Department of Computer Science and Engineering, IIT(BHU) buildings as indoor buildings and the railway platform as an outdoor scenario. Here, we use single-channel LG in our experiment. The distance between LNs and LG varies from 5 to 50 meters. The floor map illustrates the walls, doors, and windows between LNs and LG. We consider railway stations for the outdoor environment. The outdoor environment did not consist of obstacles between LNs and LG.
- Categories:
304 Views
The concept of wellness, as proposed by Halbert L. Dunn, recognizes the importance of multiple dimensions, such as social and mental well-being, in maintaining overall health. Neglecting these dimensions can have long-term negative consequences on an individual's mental well-being. In the context of traditional in-person therapy sessions, efforts are made to manually identify underlying factors that contribute to mental disturbances, as these factors, if triggered, can potentially lead to severe mental health disorders.
- Categories:
157 Views
With the increasing use of drones for surveillance and monitoring purposes, there is a growing need for reliable and efficient object detection algorithms that can detect and track objects in aerial images and videos. To develop and test such algorithms, datasets of aerial videos captured from drones are essential.
- Categories:
959 Views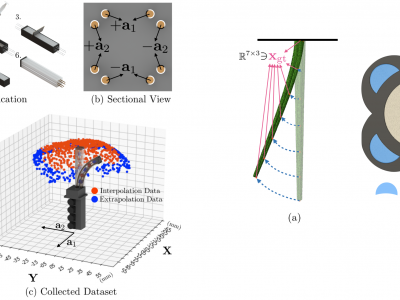
Soft robots are a promising area of research due to their potential use in various applications. Learning the kinematics of soft robots is crucial for their advancement and application. This dataset is designed to provide training data for the development of machine learning models that can learn the kinematics of soft robots with different actuation types. The dataset includes the positional data of three soft robots, specifically the simulated pneumatic soft robot, simulated tendon-driven soft robot, and real-world tendon-driven soft robot.
- Categories:
40 Views
(a) The sample stage lifts the sample up to the tip of the cantilever until the tip-sample distance is about 2 mm or less, which facilitates safe pre-approach between the tip and the sample. (b) The laser-cantilever is aligned by moving the laser, while detecting the tip and the sample and measuring their positions. (c) The laser beam reflected from the cantilever head is aligned with the center of PSPD based on the electrical signals of PSPD.
- Categories:
49 Views
Normal
0
7.8 磅
0
2
false
false
false
EN-US
ZH-CN
X-NONE
- Categories:
49 Views
The advancements in the field of telecommunications have resulted in an increasing demand for robust, high-speed, and secure connections between User Equipment (UE) instances and the Data Network (DN). The implementation of the newly defined 3rd Generation Partnership Project 3GPP (3GPP) network architecture in the 5G Core (5GC) represents a significant leap towards fulfilling these demands. This architecture promises faster connectivity, low latency, higher data transfer rates, and improved network reliability.
- Categories:
3308 Views
The Inverter Fault Diagnosis dataset is a comprehensive collection of data aimed at facilitating research and development in the field of fault diagnosis for solar integrated grid-side three-phase inverters. This dataset includes three key features, namely Ea, Eb, and Ec, representing the energy calculated from the fault currents for phases A, B, and C, respectively.
- Categories:
1089 Views