This dataset is in support of my following Research papers
Preprint (Make sure you have read Caution) :
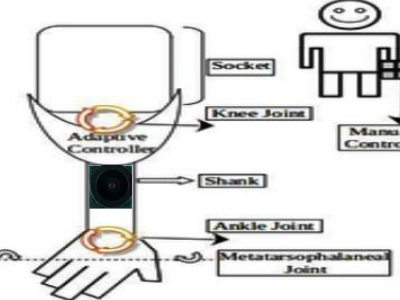
- Novel ß Transtibial Prosthetic 9-DoF Artificial Leg Adaptive Controller - Part I*
https://doi.org/10.36227/techrxiv.19758517.v1
- Novel ß Transtibial Prosthetic 9-DoF Artificial Leg Adaptive Controller - Part II*
https://doi.org/10.36227/techrxiv.19762762.v1
- Categories:
