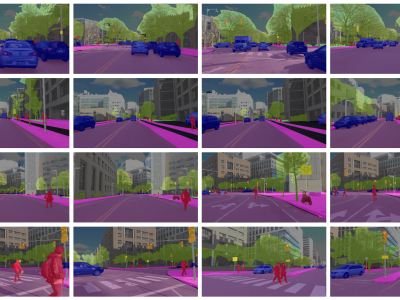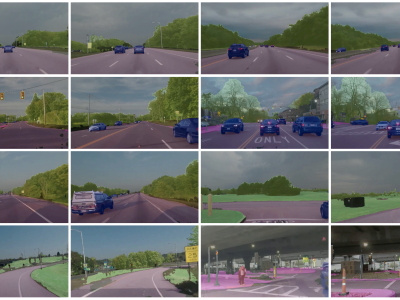
Solving the external perception problem for autonomous vehicles and driver-assistance systems requires accurate and robust driving scene perception in both regularly-occurring driving scenarios (termed “common cases”) and rare outlier driving scenarios (termed “edge cases”). In order to develop and evaluate driving scene perception models at scale, and more importantly, covering potential edge cases from the real world, we take advantage of the MIT-AVT Clustered Driving Scene Dataset and build a subset for the semantic scene segmentation task.
- Categories: