Agriculture

Straw burning poses a significant threat to air quality and public health, primarily due to the emissions of smoke aerosols and associated hazards. Satellite-based remote sensing techniques often have limitations such as long revisit times and low spatial resolution to detect small-scale straw-burning sites. Unmanned aerial vehicles (UAVs) with imaging sensors offer a fast, cost-effective alternative for monitoring and detecting straw fires. By leveraging high-resolution multi-modal images, UAVs can provide valuable insights into the occurrence and spread of straw fires.
- Categories:
 215 Views
215 Views

This dataset is the outcome of an observation on Millet traits under seed coating and covering. For covering we rely on Germination Percentage (FGP), Germination Index (GI),Mean Germination Time (MGT), Seedling Length( SL) and Seedling Vigour Index (SVI) and Abnormal Seedling have been measured. Moreover, different enzyme levels including catalase, peroxidase, and Malondialdehyde (MDA) are measured.
- Categories:
163 Views
Tea is a significant economic product in our country, and tea plantation harvesting constitutes an essential agricultural activity. The tea plantation picking work is gradually moving towards intelligence and mechanization. As an active research field, artificial intelligence recognition technology is expected to identify the large-scale tea plantation picking work that is being promoted under the current situation, as well as the identification of tea plantation picking behavior.
- Categories:
324 Views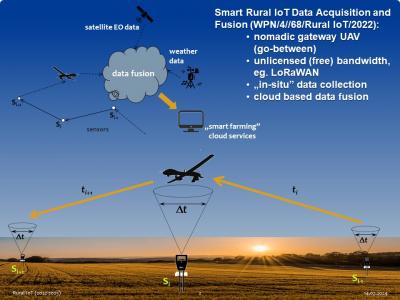
Measurement campaign was performed across the entire growing season of 2023. Seven Arduino+LoRaWAN sensors were measuring soil moisture, temperature and pH, as well as solar irradiance in the radius of about 35 km around Gdansk, Poland. Raw data were being collected with a nomadic gateway aboard an UAV and transferred to the cloud for analysis (package part A). Based on the physics informed analysis of the underlying measurement processes anomalies were classified and parametrized.
- Categories:
708 Views
We are pleased to introduce the Qilin Watermelon Dataset, a unique collection of data aimed at investigating the relationship between a watermelon's appearance, tapping sound, and sweetness. This dataset is the result of our dedicated efforts to capture and record various aspects of Qilin watermelons, a special variety known for its exceptional taste and quality.
- Categories:
2229 Views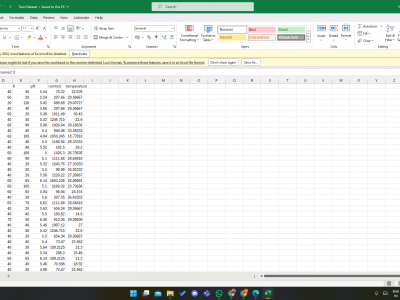
In the realm of global agriculture, the imperative of sustaining an ever-expanding population is met with challenges in optimizing crop production and judicious resource management. SmartzAgri heralds a groundbreaking approach to modern agriculture. This innovative system represents a convergence of machine learning algorithms and Internet of Things (IoT) technology, aimed at reshaping traditional paradigms of crop recommendation.
- Categories:
5177 Views
This is the pest image dataset. With this data set at hand, scientists or software engineers may create programs capable of recognizing when creatures harm farm produce. This breadth extends not only across different plants but also covers many types of bugs like aphids, leafhoppers, beetles , caterpillars etcetera providing a large diverse pool from which one can train models designed to detect pests. Arranging photos by pest species makes it easy for people looking into them understand what they should expect find.
- Categories:
2131 Views
Dataset of images of dragon fruit plants, collected from different media and taken from a dragon fruit field in Rio Branco, Brazil, with a total of 600 images classified among 300 photos of sick plants, with fish eyes among others and 300 photos of healthy plants. For many of the photos, a simple smartphone
camera was used to capture the images.
- Categories:
1089 Views
The utilization of unmanned aerial vehicle (UAV) remote sensing allows for fast and effective soil moisture content (SMC) monitoring. Scale conversion can obtain remote sensing images at multiple resolutions and offer the possibility of improving the estimation accuracy of SMC, which is significant for precision agriculture. To explore the effect of upscaling conversion on SMC monitoring with UAV remote sensing, multispectral images and SMC data at different soil depths were acquired.
- Categories:
322 Views