UWB

Ultra Wideband (UWB) signals offer high spatio-temporal resolution, penetrability, and low cost, which facilitates accurate characterization of limb features through micro-Doppler (mD) analysis, even with micro random body movements, during the wireless contactless sensing. Due to challenges introduced by arm motions, which may be perpendicular to the radar, we introduce a dual radar arm motion recognition system with light-weighted feature extraction and appropriate data fusion.
- Categories:
 23 Views
23 Views
Ultra Wideband (UWB) signals offer high spatio-temporal resolution, penetrability, and low cost, which facilitates accurate characterization of limb features through micro-Doppler (mD) analysis, even with micro random body movements, during the wireless contactless sensing. Due to challenges introduced by arm motions, which may be perpendicular to the radar, we introduce a dual radar arm motion recognition system with light-weighted feature extraction and appropriate data fusion.
- Categories:
9 Views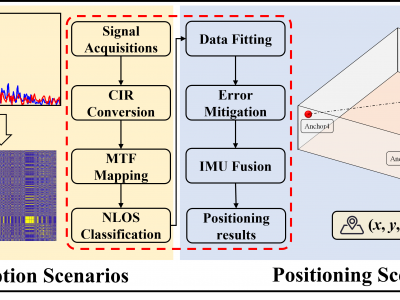
The overall process of UWB technology-based signal preprocessing and high-precision localization system architecture can be divided into two complementary modules: perception and localization. In “Sensing Scene”, the system firstly collects the CIR data generated in the environment through UWB sensors, and applies signal conversion and multi-dimensional feature mapping methods to analyze the signal attenuation characteristics of different NLOS environments, so as to realize the segmentation of the NLOS scene.
- Categories:
203 Views
The accurate distinction between line-of-sight (LOS) and non-line-of-sight (NLOS) propagation channels is paramount for precise distance measurement within ultra-wideband (UWB) indoor localization systems. In complex and dynamic environments, such as those encountered in the indoor positioning of autonomous mobile robots or vehicles, UWB signal propagation is particularly susceptible to NLOS conditions.
- Categories:
604 Views
Ultra-wideband radar (UWB) is capable of perceiving the surroundings irrespective of the visibility due to its broad frequency spectrum. Therefore, UWB technology can be employed in mobile robots to perform simultaneous localization and mapping (SLAM) in vision-denied environments (e.g. smoke, fog, walls with reflective surfaces). We chose four different environments to teleoperate a TurtleBot2 nonholonomic robot equipped with Novelda X4M300 monostatic radar modules and RPLIDAR-A2 laser range scanner(s).
- Categories:
148 Views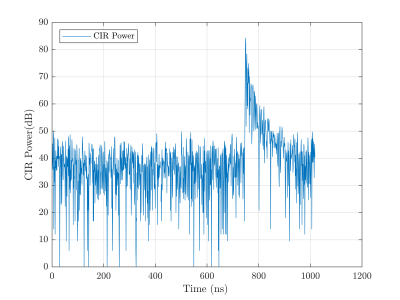
This dataset includes UWB range measurements performed with Pozyx devices. The measurements were collected between two tags placed at several distances and in two different conditions: with Line of Sight (LOS) and Non-Line of Sight (NLOS). The measurements include the range estimated by the Pozyx tag, the actual distance between devices, the timestamp of each measurement and the values corresponding to the samples of the Channel Impulse Response (CIR) after each transmission.
- Categories:
2635 Views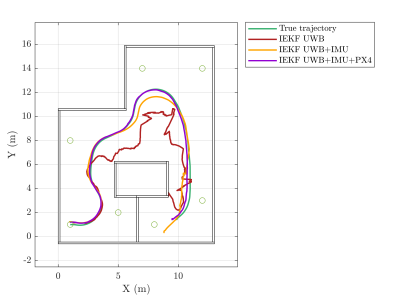
This dataset includes the measurements of a simulated vehicle inside a Gazebo simulation using different sensors: a simulated UWB tag, a IMU and a PX4Flow.
- Categories:
1167 Views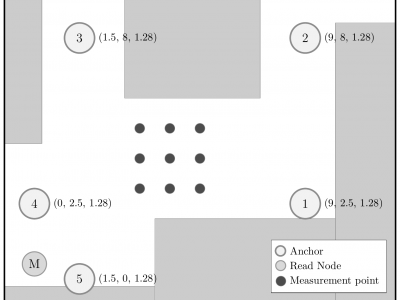
Indoor positioning systems based on radio frequency systems such as UWB inherently present multipath related phenomena. This causes ranging systems such as UWB}to lose accuracy by detecting secondary propagation paths between two devices. If a positioning algorithm uses ranging measurements without considering these phenomena, it will make important errors in estimating the position. This work analyzes the performance obtained in a localization system when combining location algorithms with machine learning techniques for a previous classification and mitigation of the propagation effects.
- Categories:
1054 Views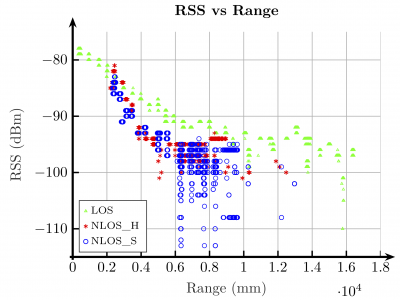
Indoor location systems based on ultra-wideband (UWB) technology have become very popular in recent years following the introduction of a number of low-cost devices on the market capable of providing accurate distance measurements. Although promising, UWB devices also suffer from the classic problems found when working in indoor scenarios, especially when there is no a clear line-of-sight (LOS) between the emitter and the receiver, causing the estimation error to increase up to several meters.
- Categories:
2187 Views
This repository contains ROS bags with measurements related to the article "Forklift Positioning System for Pallet Tracking in Industrial Environments". The dataset includes measurements from UWB tags, IMU, Magnetometer and Px4Flow simulated in Gazebo. Also includes the position estimations calculated using the algorithm described in the related paper.
- Categories:
393 Views